Search the Community
Showing results for tags 'transitiongraph'.
Found 1 result
-
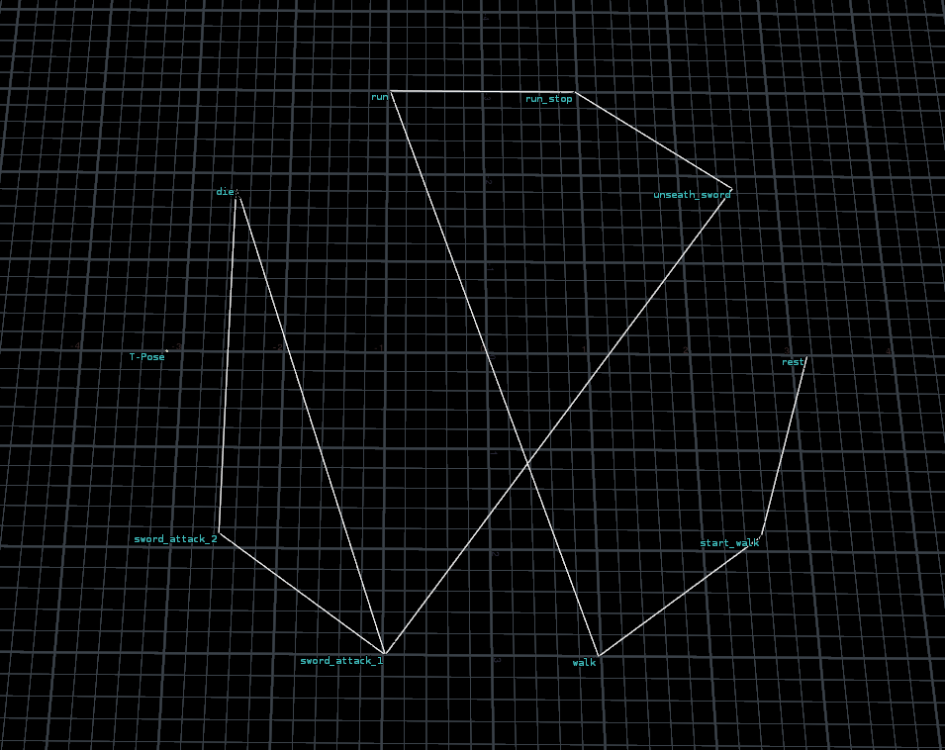
I'm getting significantly different behaviours between my transition testsim at SOP level and a custom crowd sim in DOPs. The triggers for the transitions between most of the different states in DOPs are set to run the loop only once (with the exception of running and walking). On both cases foot locking is turned on and in DOPs terrain projection is turned on. What I was expecting in DOPs was a result similar to the testsim in SOP level (testsim_transition.mp4). No idea what is causing this difference. testsim_transition.mp4 dopnet_transition.mp4