sibarrick
-
Posts
1,975 -
Joined
-
Last visited
sibarrick's Achievements
")
Newbie (1/14)
18
Reputation
-
I've never actually tried this so I don't know if fundamentally what you are doing is the right way to do it. But purely from what you have already posted, wouldn't you just say myLastCookTime starts at 1 or some user defined sim start point, and then once your cook loop has run just set it equal to "now" ready for the next jump in time. You'll probably need to reset it to 1 again if myLastCookTime > now.
-
Works ok on my windows 8 laptop either with or without gnomons
-
When I try and import scipy I just get an error, has this been removed from Houdini since H12.5?
-
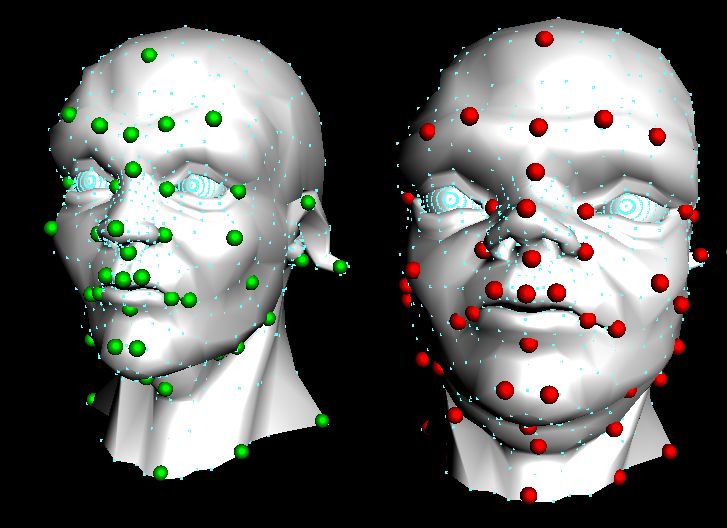
As a comparison too, here is the same thing with a switch to compare to the CHOP method. Clearly way faster and if you don't need to get into the code to do anything different then probably the better solution in most cases for basic deformation.... RBFmorpher.otl ExampleRBF.hipnc
-
Hi all, Been away for so long, this is my first post in some years I believe. Anyway I was at a Houdini event the other day and they were talking through all the great new features in Houdini 13 and beyond and I noticed on one of the slides that numpy is now included in Houdini since 12.5 or even earlier. It's been so long since I delved into Houdini that this massively useful fact had totally passed me by. The first thing that lept into my head when I saw this was my old HDK sop RBF morpher which is a totally awesome deformer that has gotten me out of so many tricky deformation scenarios over the years. Finally I realised I could re-write this in a Python sop and not have the issue of people needing to compile it to use it. A few days later and after a couple of hours work here is the result. No error checking yet just the bare bones of the functionality. Of course it's no where near the speed of the HDK one, but hey at least compilers aren't an issue with this one. This is the source code and I've attached a example hip file and otl, non-commercial versions. # This code is called when instances of this SOP cook. import numpy as np import math node = hou.pwd() geo = node.geometry() inputs = node.inputs() kernel = node.parm('kernel').eval() power = node.parm('power').eval() scale = node.parm('scale').eval() def linear(r): return r def smooth(r): return r*r*math.log1p(r*r) def cube(r): return r*r*r def thinPlate(r): return r*r*math.log1p(r) def sqrt(r): return math.sqrt(r) def pow(r): return math.pow(r,power) kernels = {0: linear, 1: smooth, 2: cube, 3: thinPlate, 4: sqrt, 5: pow} def rbfU(r): return kernels[kernel](r) if len(inputs) > 2: featureGeo = inputs[1].geometry() targetGeo = inputs[2].geometry() numFeaturePoints = len(featureGeo.iterPoints()) matrixQ = np.zeros((numFeaturePoints,4)) #setup all the matrices with the feature point positions i = 0; for p in featureGeo.points(): matrixQ[i,0] = p.position()[0] matrixQ[i,1] = p.position()[1] matrixQ[i,2] = p.position()[2] matrixQ[i,3] = 1 i += 1 #print matrixQ matrixQtranspose = matrixQ.transpose() #print matrixQtranspose matrixK = np.zeros((numFeaturePoints, numFeaturePoints)) #scale = 1 for row in range(numFeaturePoints): for col in range(numFeaturePoints): ppt = featureGeo.iterPoints()[row] p1 = ppt.position() ppt = featureGeo.iterPoints()[col] p2 = ppt.position() p = p1-p2 matrixK[row,col] = rbfU(p.length()/scale) #print matrixK #setup the final set of linear equations in one massive matrix matrixA = np.zeros((numFeaturePoints+4, numFeaturePoints+4)) for row in range(numFeaturePoints): for col in range(numFeaturePoints): matrixA[row,col] = matrixK[row,col] for row in range(numFeaturePoints): for col in range(numFeaturePoints, numFeaturePoints+4): matrixA[row,col] = matrixQ[row,col-numFeaturePoints] for row in range(numFeaturePoints, numFeaturePoints+4): for col in range(numFeaturePoints): matrixA[row,col] = matrixQtranspose[row-numFeaturePoints,col] #print matrixA #setup the solutions to all the linear equations, i.e. the target feature positions targetX = np.zeros((numFeaturePoints+4)) targetY = np.zeros((numFeaturePoints+4)) targetZ = np.zeros((numFeaturePoints+4)) i = 0; for p in targetGeo.points(): targetX[i] = p.position()[0]; targetY[i] = p.position()[1]; targetZ[i] = p.position()[2]; i += 1 #solve the linear equations to find the weights that map the features to the targets weightsX = np.linalg.solve(matrixA, targetX) weightsY = np.linalg.solve(matrixA, targetY) weightsZ = np.linalg.solve(matrixA, targetZ) #print weightsX #apply the weights to the actual points on the input geometry to get the final resulting positions relative to the target feature points NfPts = numFeaturePoints for opt in geo.points(): outX = weightsX[NfPts]*opt.position()[0] + weightsX[NfPts+1]*opt.position()[1] + weightsX[NfPts+2]*opt.position()[2] + weightsX[NfPts+3]; outY = weightsY[NfPts]*opt.position()[0] + weightsY[NfPts+1]*opt.position()[1] + weightsY[NfPts+2]*opt.position()[2] + weightsY[NfPts+3]; outZ = weightsZ[NfPts]*opt.position()[0] + weightsZ[NfPts+1]*opt.position()[1] + weightsZ[NfPts+2]*opt.position()[2] + weightsZ[NfPts+3]; p1 = opt.position() i = 0 for p2 in featureGeo.points(): p = p1-p2.position(); rF = rbfU(p.length()/scale); outX += weightsX[i]*rF outY += weightsY[i]*rF outZ += weightsZ[i]*rF i+=1 opt.setPosition((outX,outY,outZ)) [/CODE] ExampleRBF.hipnc RBFmorpher.otl
-
That one plus a few others have now been updated to compile for H11, hopefully more to follow....
-
Just key frame the slider, set a key on frame 1 and set the slider to 0, and set a key on frame 25 and set the slider value to 1. You can keyframe and animate any parameter in Houdini just as you would at object level in any other package.
-
Not sure how you'd get round that, you could re-project the texture coordinates after the deformation but then the displacement won't look like it's attached to the object. I think it's a big catch 22.
-
Fixed in H11.0.581
-
I think the problem here is what you are describing is exactly what you'd expect to happen. If the texture is stuck to the geometry via a rest position and then the geometry stretches then naturally so will the texture. The only way around that is to use a world space texture but if the model is animating it will then appear to travel through the texture space and it won't be stuck to the model.
-
This seems to be broken again in H11, haven't got to the bottom of why yet but I'll start by looking at the ray hot vop again.
-
Good link, cheers!
-
Actually the 2 things I found most interesting were the multi-lense stuff allowing refocusing of an image, I wonder if it's possible to actually render images that way in an efficient manner. And also the idea of having a server doing online rendering directly into a browser pluign.
-
Watch this from about 1 hour in, very interesting stuff.... Nvidia keynote
-
RMB on it and unlock it. Make your changes. RMB on it and save it. RMB on it and match definition.