Search the Community
Showing results for tags 'previous'.
Found 2 results
-
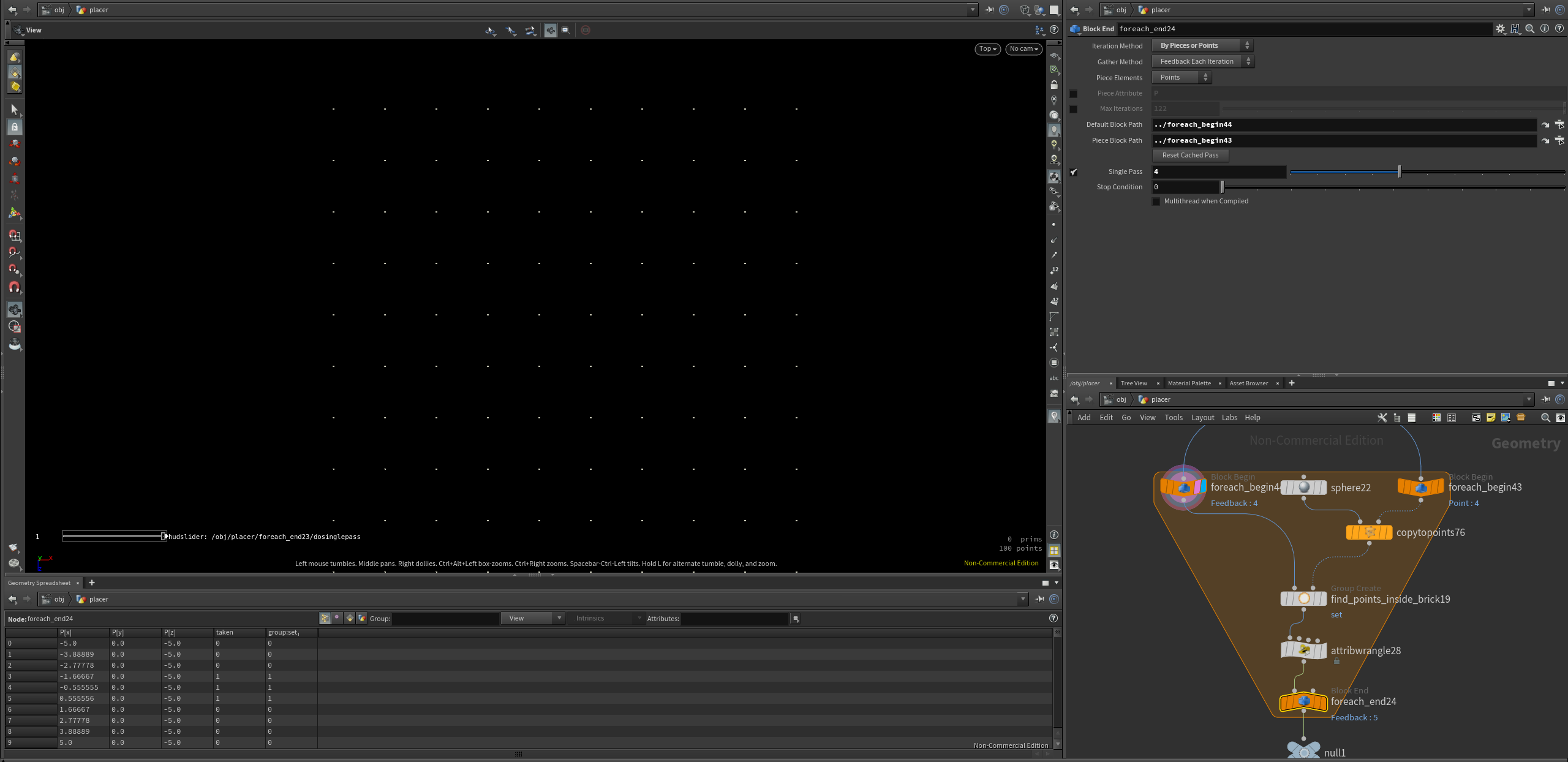
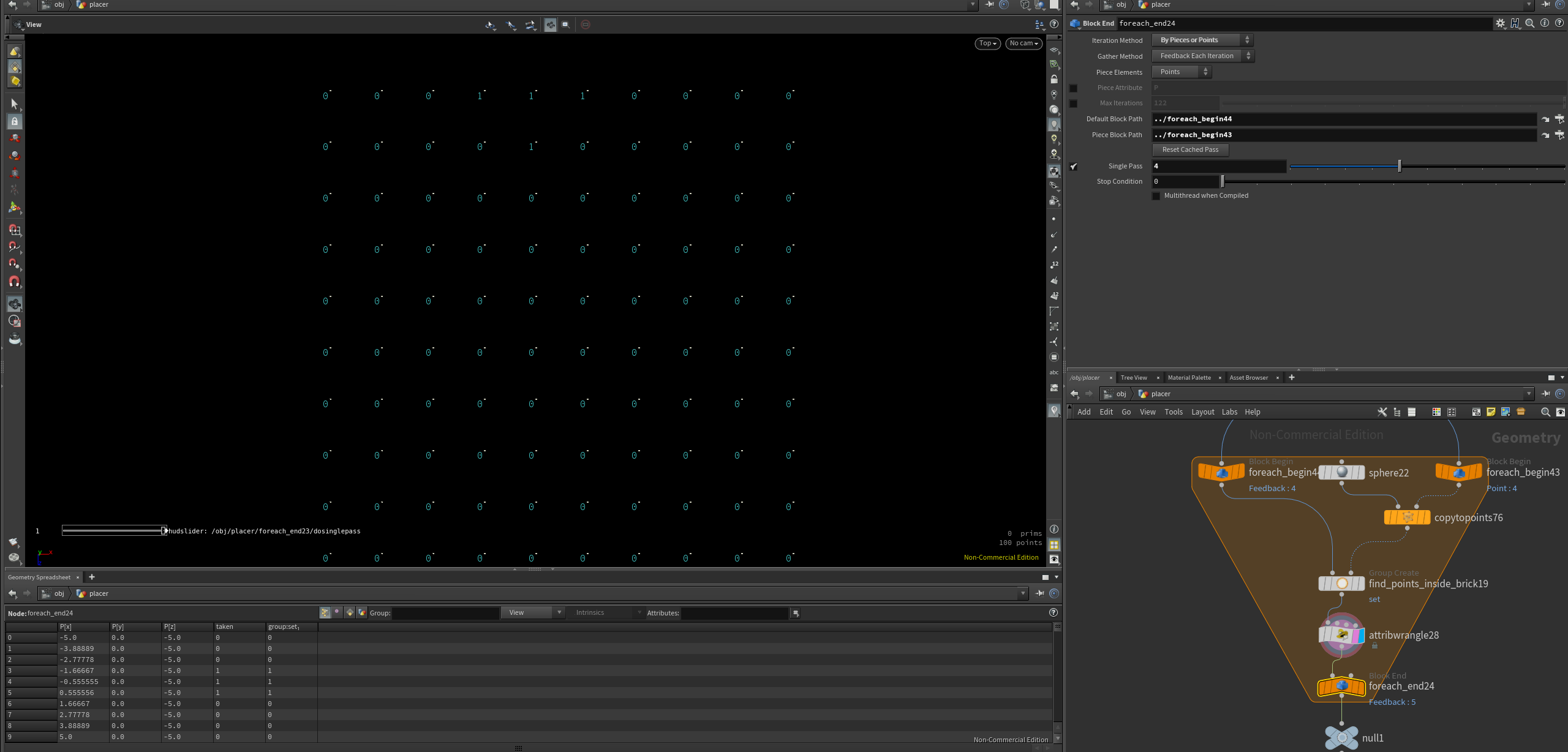
 Hi everyone. I cannot find any information on how to get an attributes created during the previous iteration within For Loop with Feedback? One of the dilemma why when Single Pass is on and Pass is 1+n, I cannot see attributes created on points from previous iteration? I use Fetch Feedback as a data for previous operations. And Fetch Point as a single point extraction around which I want to perform operations on the current pass. I tried to extract the number of the current iteration with Metadata node and find ptnum based on it, but without success. So I use Fetch Point for that. I wanna to pass attributes from current itteration to the next one. And read preaviously created attributes in current pass. So the the attributes would interact throut itterations. I add test file. 4loop_ftb_test.hipnc Any tips or tricks? 4loop_ftb_test.hipnc
Hi everyone. I cannot find any information on how to get an attributes created during the previous iteration within For Loop with Feedback? One of the dilemma why when Single Pass is on and Pass is 1+n, I cannot see attributes created on points from previous iteration? I use Fetch Feedback as a data for previous operations. And Fetch Point as a single point extraction around which I want to perform operations on the current pass. I tried to extract the number of the current iteration with Metadata node and find ptnum based on it, but without success. So I use Fetch Point for that. I wanna to pass attributes from current itteration to the next one. And read preaviously created attributes in current pass. So the the attributes would interact throut itterations. I add test file. 4loop_ftb_test.hipnc Any tips or tricks? 4loop_ftb_test.hipnc

-
Hi guys, I have a rigid body sim with constraint network, I want to access the previous frame and current frame data of the constraints (impact, forces etc) inside a sop solver in DOPs. Currently when I call the attribute in a wrangle from the relationship geometry node I don't know if it's current frame data or previous frame. How to get both the current and previous frame data in a wrangle in sop solver in dops?