Search the Community
Showing results for tags 'sop'.
-
Hi all! KeenTools team here, some of you might know us from our tracking tools for Nuke, Blender, or AE. We’ve finally brought our geometry-based object and camera tracker to Houdini as a native SOP node. It allows motion designers, VFX artists, and generalists to do matchmove tasks right inside Houdini, with full support for both OBJ and Solaris workflows. It’s a huge time-saver, as you can now capture animation from 2D footage directly inside the scene and then turn tracked geometry into colliders or emitters for simulations – all with zero app switching. Downloads, details, tutorials here: https://keentools.io/products/geotracker-for-houdini It’s in open beta now, so we’re relying on your feedback to get it right. Would really love to hear what works for you. Cheers!
-
Please help me, how should I approach this geo effect? Let’s take a single line as a base geometry. From this line, generate a new geometry composed entirely of dots. The dot pattern is inspired by fake Morse code: it follows the visual logic of Morse, but only consists of dots with different density. Only dots are used - no dashes. What would normally be a dash is represented as a region of higher dot density (clusters of tightly packed points). Pauses or separations are represented by lower-density or empty gaps - something like that. Any ideas?

-
Hi, As known Houdini makes hard tasks easy and easy tasks hard. So at first sight really simple task, but I cannot find a way to overcome it. The bridge that connects hole in ngon looks like it is somehow outer edge of a polygon. Maybe there is a way to some how fuse it or ignore such an inner edge during for example resampling? Fuse bridge that connects hole in ngon.hipnc

-
Hello frens, I'm trying to create attached animation video. But I couldn't do it with my limited knowledge. It is just for my curiosity. I wanna know how to do this really really. Everything is random or not, I don't know. Or it can be depend on Boltzmann's entropy formula as below information. If someone help me about to create this animation. I would be happy really. Best regards. fyi: it is a NFT art made by PAK. On the art's description " S = k log W " https://www.sothebys.com/en/digital-catalogues/the-fungible-collection-by-pak https://www.niftygateway.com/itemdetail/primary/0xc7cc3e8c6b69dc272ccf64cbff4b7503cbf7c1c5/3/ Complexity.mp4
-
Hello all, Maybe a dumb thing, but I can't figure it out right now. I rebuild a simple setup to understand the issue (you will find the file attached) I have a simple wall that I want to break (RBD SOP) I created a sphere emitter on the other side, with RBD bullet solvers too (RBD SOP), and switches ($FF%20==1). Plugged this one into RBD (wall) for collision. Issue : Only my first sphere is taken in account. 1) Do I need to use DOP ? (didn't figure out the setup yet) 2) I guess as the sphere are spawn over time, the solver can't understand the data ? Let me know your thought. Thank you RBD_Emit.hipnc
-
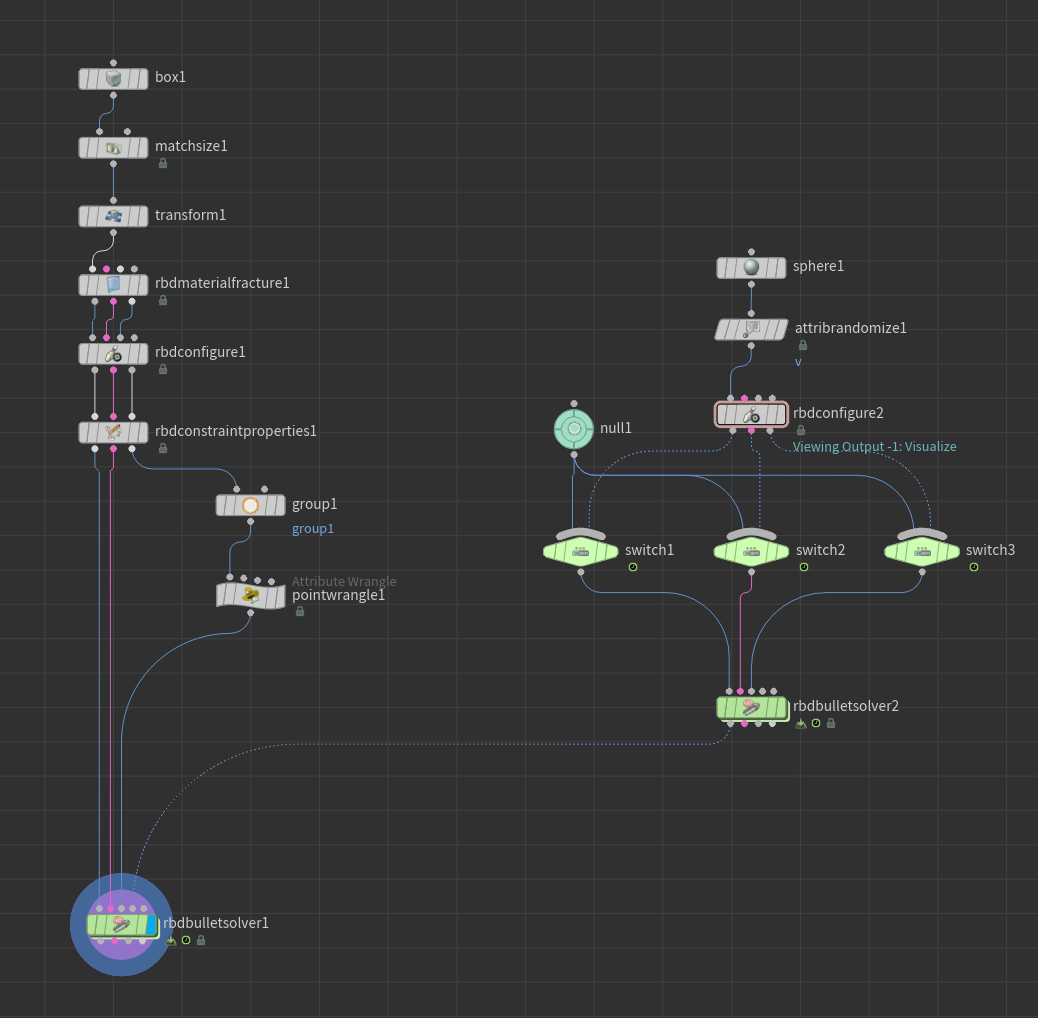
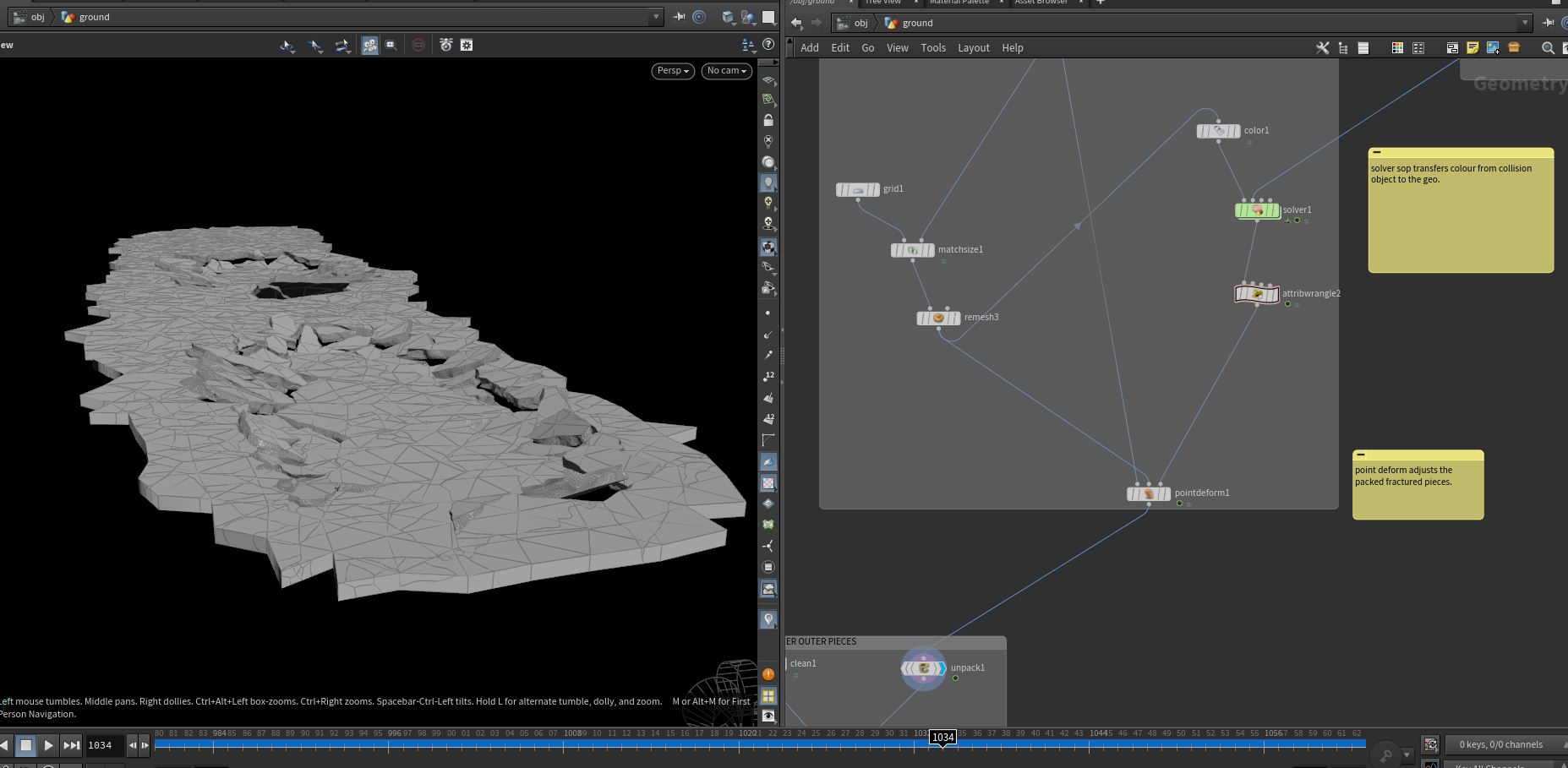
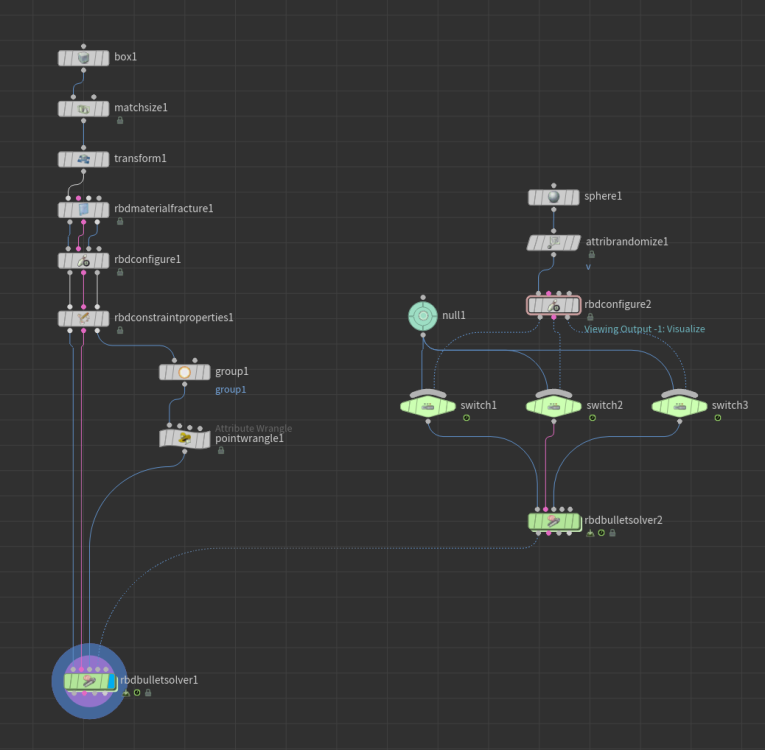
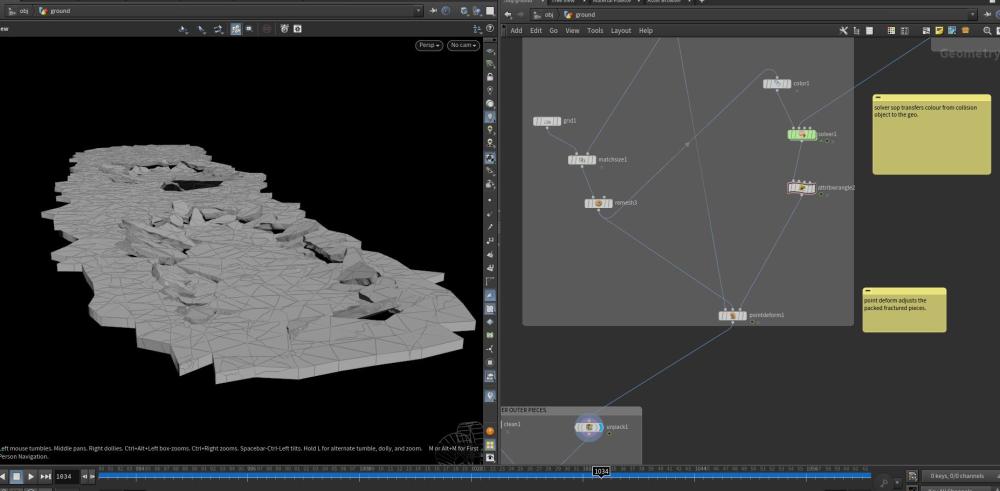
 hi all i'm trying to work up an rbd sim for some ground fracturing. I have an object colliding with the geo and transferring colour to it. Now in the scene (included) i have a setup that is NON-dopnet based... just using a point deform to shift the pieces - its kinda cool But i wondered if i can get the colour to transfer over to my rbd sim and activate the pieces? red being active and black being inactive? ground_geo.abc shot_WRLDBRK_0196_scene_for_odforce.hip
hi all i'm trying to work up an rbd sim for some ground fracturing. I have an object colliding with the geo and transferring colour to it. Now in the scene (included) i have a setup that is NON-dopnet based... just using a point deform to shift the pieces - its kinda cool But i wondered if i can get the colour to transfer over to my rbd sim and activate the pieces? red being active and black being inactive? ground_geo.abc shot_WRLDBRK_0196_scene_for_odforce.hip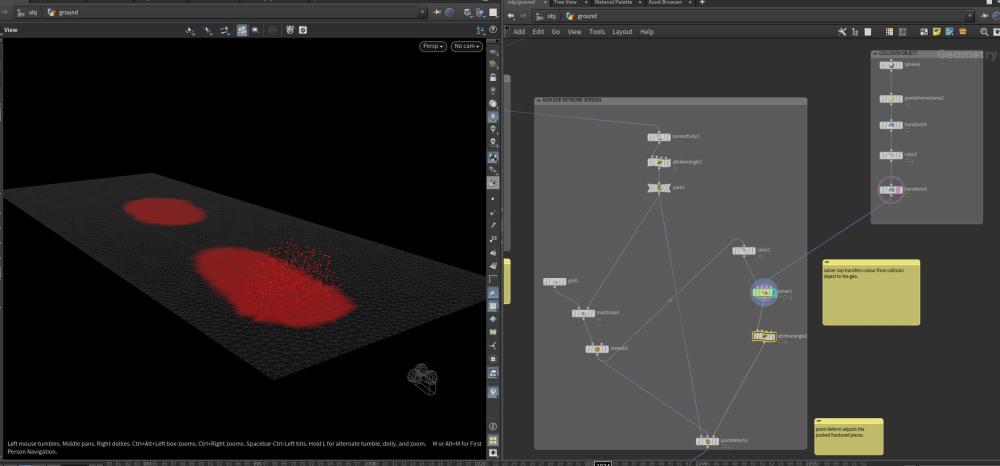
-
 https://ibb.co/Y2N8z8B Made a grid to use its points as your particle sources connected a pop net to it In the pop net i mainly edited the POP Source Source Tab: changed geometry source to "use first Context Geometry" to use grid points as sources Birth Tab: Crank your "Const Birth Rate" a little up and change the "Jitter Birth Time" to negative. This made the points fall a little more unperfect Attributes Tab: "Initial Velocity" gets setted to Set innitial v and than adjust the variance slightly of x and z. The points will not fall straight downward but a little left and right. i added an additonal nodes like "popinteract" to get them a bit together if they are close or add some forces to mak their movement a little more random like a small "pop wind" or so Outside the Popnet i added some additional nodes so the points get geometry. added a "attributeadjustfloat" with a operation as "set initial" and Pattern Type as "Random" with Min/Max values to my likeing (this randomly changed the size of the "droplets") added a "vdb from particles" node with quiet a small point radius and smaller voxel size. added a convert vdb and set it to polygon to get the final geometry. https://ibb.co/TPxDzsr
https://ibb.co/Y2N8z8B Made a grid to use its points as your particle sources connected a pop net to it In the pop net i mainly edited the POP Source Source Tab: changed geometry source to "use first Context Geometry" to use grid points as sources Birth Tab: Crank your "Const Birth Rate" a little up and change the "Jitter Birth Time" to negative. This made the points fall a little more unperfect Attributes Tab: "Initial Velocity" gets setted to Set innitial v and than adjust the variance slightly of x and z. The points will not fall straight downward but a little left and right. i added an additonal nodes like "popinteract" to get them a bit together if they are close or add some forces to mak their movement a little more random like a small "pop wind" or so Outside the Popnet i added some additional nodes so the points get geometry. added a "attributeadjustfloat" with a operation as "set initial" and Pattern Type as "Random" with Min/Max values to my likeing (this randomly changed the size of the "droplets") added a "vdb from particles" node with quiet a small point radius and smaller voxel size. added a convert vdb and set it to polygon to get the final geometry. https://ibb.co/TPxDzsr -
Hello! I'm following this tutorial: and have been getting similar results up until around 22:10, when my simulation behaves entirely differently. My worm just goes flying. I've messed around with the values in the set_force attribute wrangle inside the sop solver, but can't seem to get anything like what he is. Obviously it's working to some extent, because a force is being created. I'm pretty sure I did everything the same as him... can anybody help me out? Here's my file:Larva2.hipnc
-
I'm leaving this file here in case you want to sort the point order of a triangle sphere. Its not particularly usefull but I was tasked with that challange and thats what I came up with... Hope it helps, and if any of you has a better method feel free to share! sorting_a_triangle_sphere.hip
-
-
Getting closer to a new surreal idea I had in mind for a long time...Walls with Eyes! Here is my initial test for a small section of the wall. hoping to add in more detail and deformations to the rig the wall skin rig. I made the entire model and rig process combined into a single HDA. May need to optimize the HDA further to speed up things. Instead of using deformers to the bend the grids I started off with using curves and a combination of ray intersects and vex to create the eyelids, after creating the initial shape I was able to skin the curves using the Skin SOP, this gave me more control on how I can design the character, without worrying about intersection polygons and normals. The curves also acted as representatives for each loop on the wall and so I was able to control them in wrangles through multiple technics in vex.
-
LookAt Setup in SOPs, VEX, VOPs. Having used the Houdini default tools several times, I wanted to achieve the same effect in SOPs. Here is a detailed post to understand better how the LookAt works and how it can be used in creative ways https://www.sharanvaswani.com/single-post/2020/09/27/Using-VEX-and-SOPs-to-make-a-LookAt-Setup
-
Hello dear people of the force. In lops: I have been trying to set up a simulation that takes existing point instances and then modifies them with a dop inside a sopnetwork. I have been looking at the drop node to try and kitbash a solution. I keep on having the problem that it just doesn`t work. I also can`t get modify point instances to work balls_test2.hiplc
-
 Hey all. Just posting a new tool I recently wrote in case anyone is interested. It's an HDA for saving attributes into either data textures or mesh vertex channels for use in realtime shaders. I needed to do some fancy pivot caching and mograph type stuff in a Unity shader and after hacking together a solution with a python SOP I figured I'd package it up nicely for future projects. https://github.com/pixel-ninja/packChannelsHDA/releases/tag/v1.0
Hey all. Just posting a new tool I recently wrote in case anyone is interested. It's an HDA for saving attributes into either data textures or mesh vertex channels for use in realtime shaders. I needed to do some fancy pivot caching and mograph type stuff in a Unity shader and after hacking together a solution with a python SOP I figured I'd package it up nicely for future projects. https://github.com/pixel-ninja/packChannelsHDA/releases/tag/v1.0 -
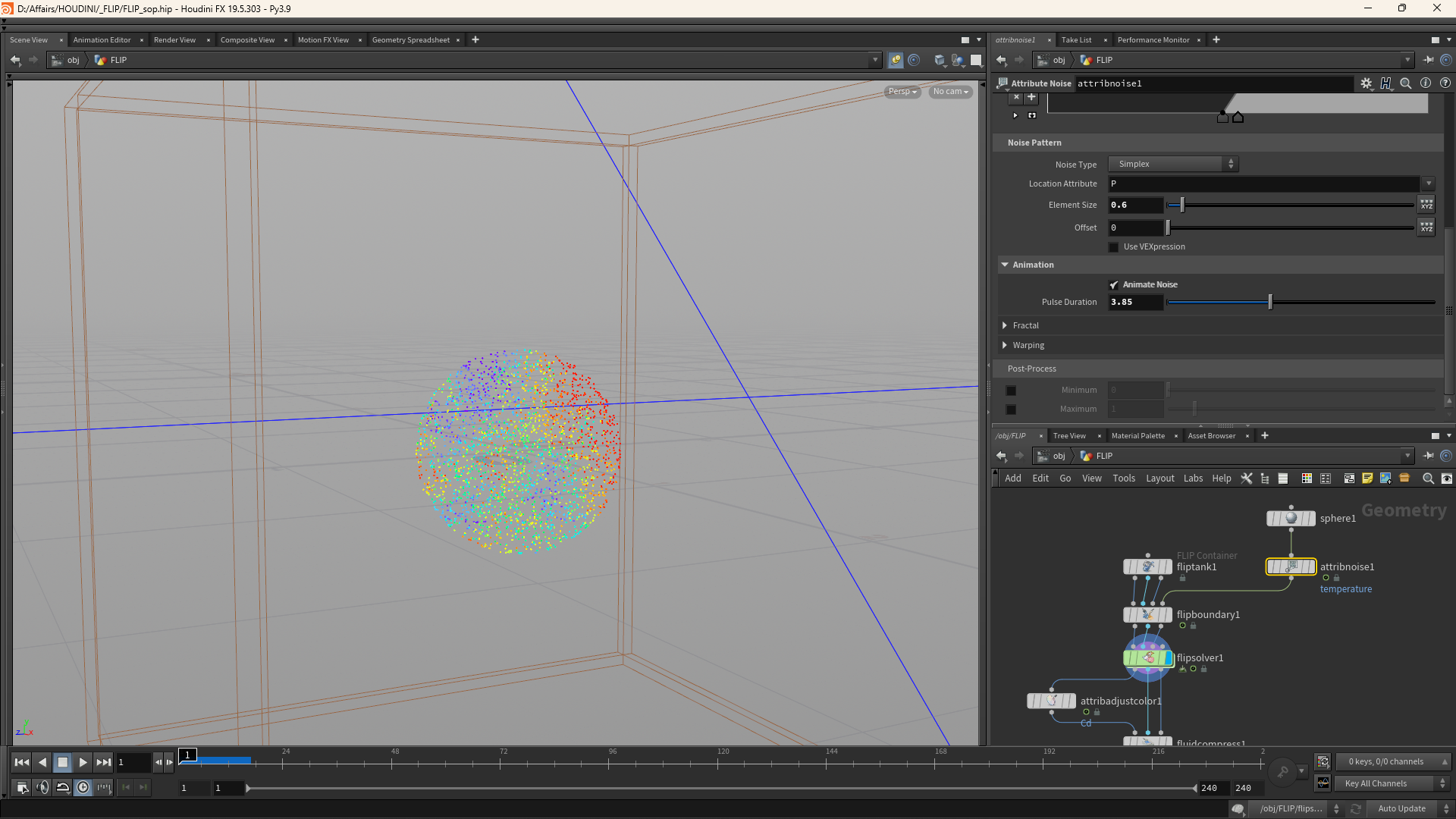
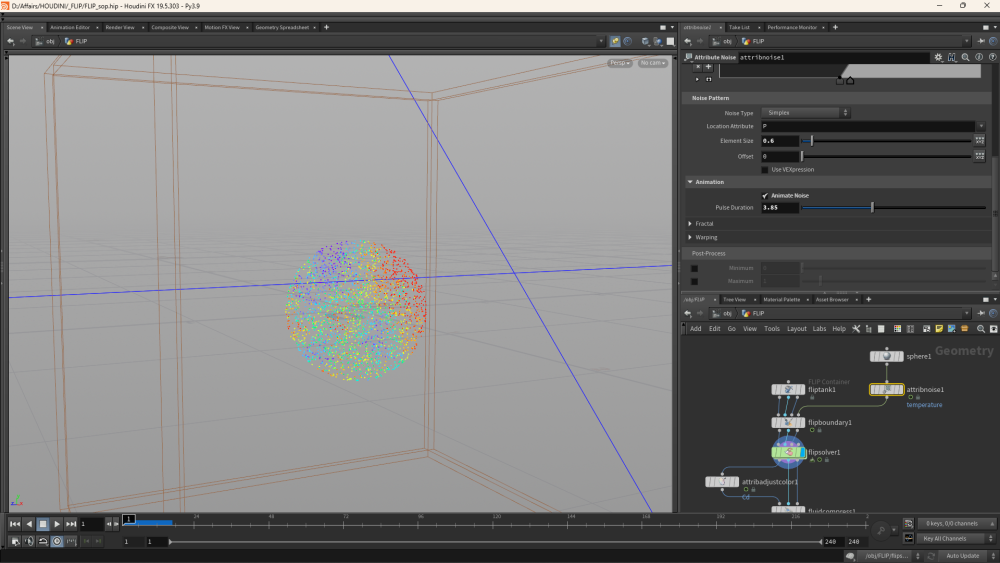
Hi. I am testing FLIP sop, in particular "flip configure lava". As a temperature input "anoise" was used. I would like to animate it but when you animate anything outside the solver it is obviously not updated within a sim. If I were about to make it with dop network I could have make a wrangle with a reference to sop level animated noise. But FLIP sop converts geometry already inside solver so I can't refer to any point attribs as long as particles sims are implemented already inside solver and don't exist on a sop level. My question is how to animate any attributes inside flip sop solver?
-
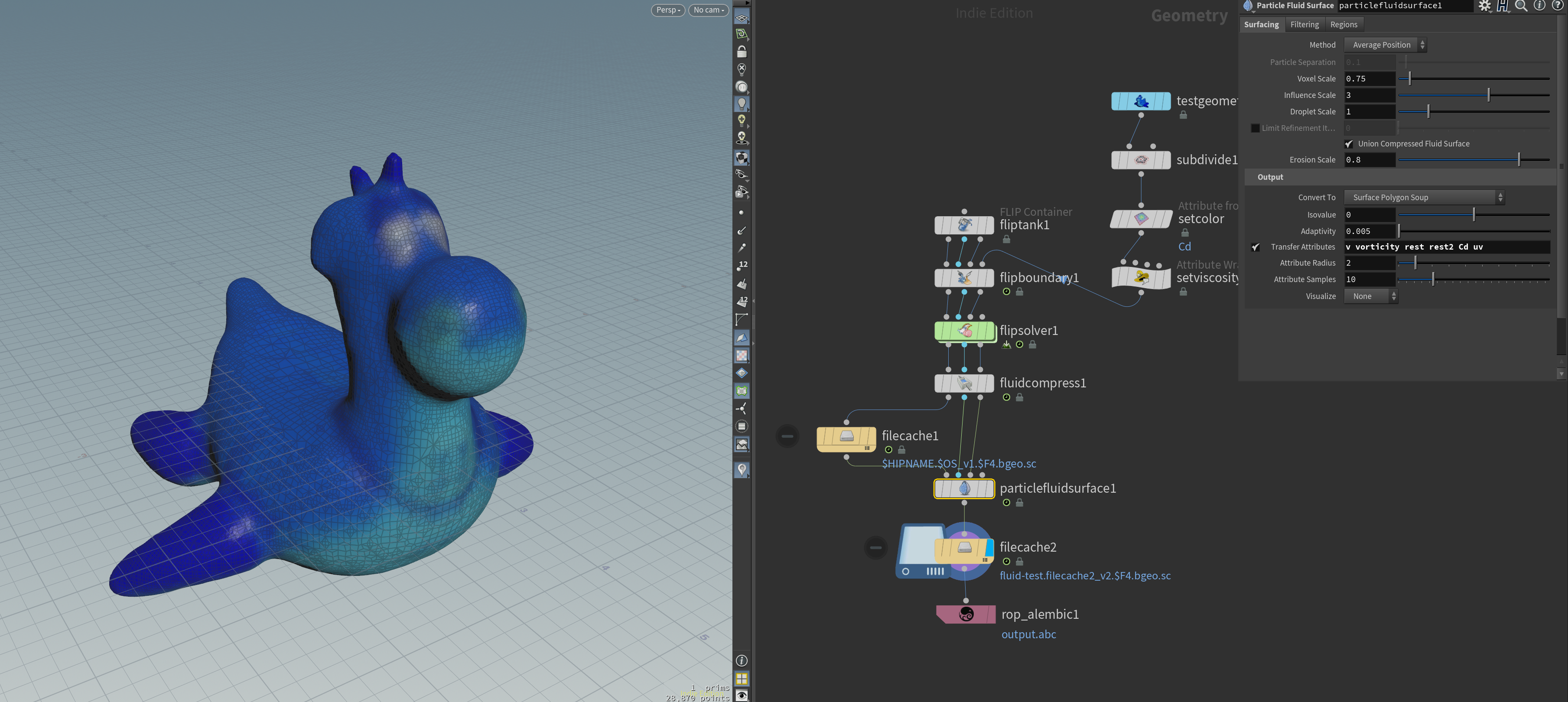
 I start to learn the new sop fluid workflow, but there is no uv data on final output mesh. How can i keep uv from the beginer model to final fluid mesh? fluid-test.hip
I start to learn the new sop fluid workflow, but there is no uv data on final output mesh. How can i keep uv from the beginer model to final fluid mesh? fluid-test.hip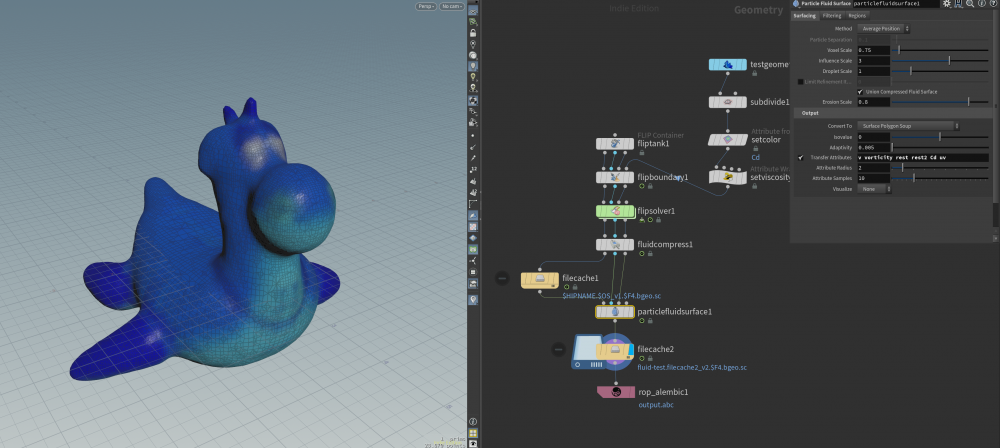
-
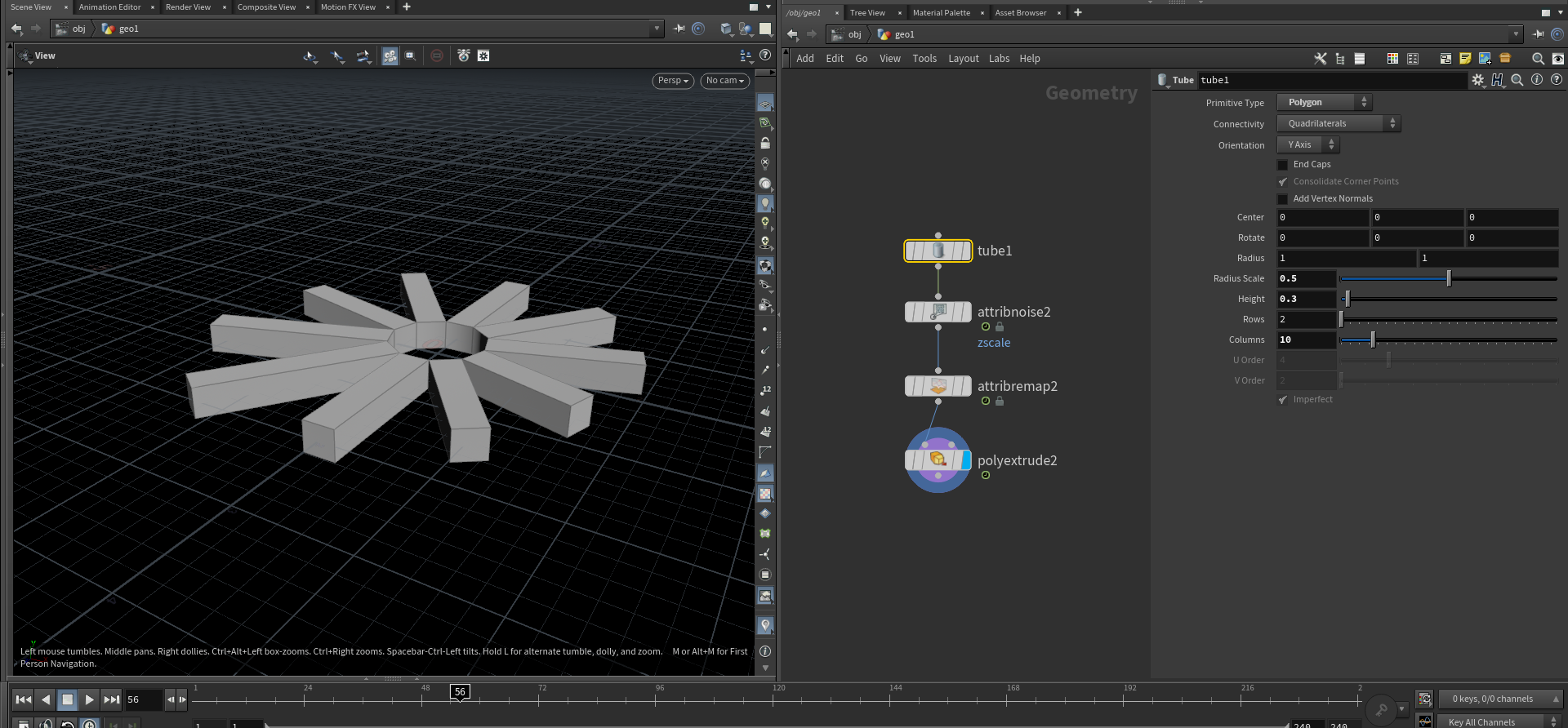
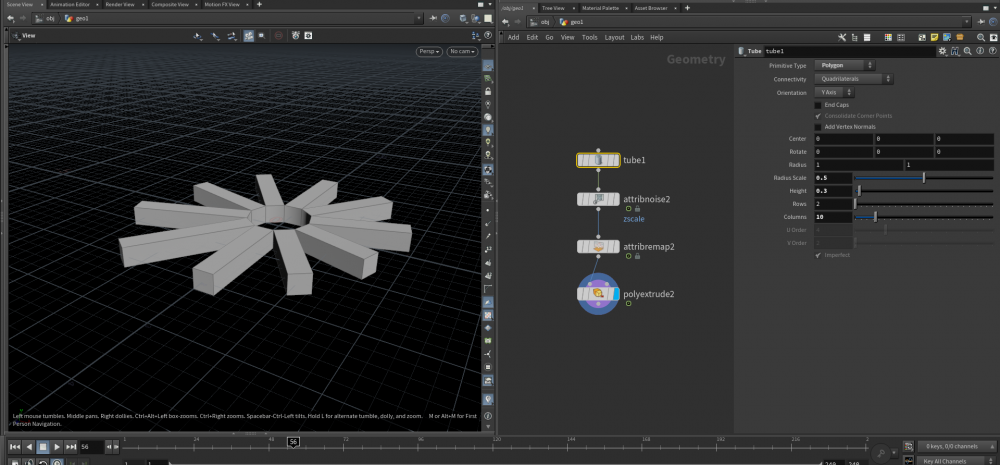
Hello, I have a tube, I want to animate the radius scale. So that it expands and shrinks randomly. I want it to look like it's being animated by a noise. My problem is that I don't know how access the radscale in the tube geo. Thanks!
-

Create point group which are not connected
Apurba Haldar posted a topic in General Houdini Questions
How create point group which are not connected. like the ss below?
-
Hi! I wanted to know if there is a way to extrude points to generate curves from that extrusion, I was surprised that the Extrude SOP didn't accepted that kind of operation. I had a workaround for doing this using the "Copy to points" SOP to copy the input points (the ones that will sweep trough the target curve) to each point of the target curve and orient them via "orient" attrib also I had to define an "id" attrib" for each point so then I'll connect them with the "Add" SOP. Anyone has better ideas to tackle this? Thanks!
-
Hello, Trying to work with RBD bullet solver and conetwistconstraint, but I found a limitation in SOP Bullet solver, cause it has only one conetwistconstraint settings, and in case if I have more than one conetwist constraint it become a problem. I tried to add it inside solver but have no success.
-
 Hello For a cloth set up I need to have the same remesh (via Remesh SOP node) result of an object on each shot. The object to remesh is the same in all shots, but is Position change. I can not dive in the Remesh node but it seems that while translating an object, is remesh result change. What I want to achieve is to have the same remesh result for each object base position. My ideas was to use a rest pose, or find a VEX function that does the same as the Remesh node but I can't figure it out. Thank you for ur time
Hello For a cloth set up I need to have the same remesh (via Remesh SOP node) result of an object on each shot. The object to remesh is the same in all shots, but is Position change. I can not dive in the Remesh node but it seems that while translating an object, is remesh result change. What I want to achieve is to have the same remesh result for each object base position. My ideas was to use a rest pose, or find a VEX function that does the same as the Remesh node but I can't figure it out. Thank you for ur time -
 Hi all, Is there a way I can use a shelf tool python script to select a joint in the rig tree window pane when I have a rig pose SOP selected?
Hi all, Is there a way I can use a shelf tool python script to select a joint in the rig tree window pane when I have a rig pose SOP selected? -
Hey, bit of a specific use case here, but has anyone successfully used the .asCode() Python function with the SOP solver? I can't seem to get it to save and recreate the nodes inside of the sop level solver node. I spent some time researching it but haven't found anyone even mentioning this problem. Everything else seems to work fine with the function even the DOP level SOP solver. It's just the SOP level solver that has this issue. I'm kind of at my wit's end trying to figure this out. I might be missing something super simple or obvious here, but I'm hoping someone else has encountered this and figured out what is happening. I suppose it could also be a bug, I haven't taken the time to dig through all the change logs on the SideFX website. I'm currently encountering this in Houdini 18.0.348 (which has known issues with the .asCode() function) as well 18.0.597 (where those issues have supposedly been resolved). If anyone has any insight I'd really appreciate a nudge in the right direction. Cheers, Brandon
-
Hello, I'm han. I have a question. I did Sphere -> Mountain(noise animated) -> Scatter & Sphere -> Mountain(noise animated) =Points and Sphere Merge (*so I want to sphere moving and scatter points are also moving) but Scatter points are jittering(not stick to sphere). How can I fix it? Roughness down, Octaves down -> Little bit comfort movement but, is that solution to not jittering(not change roughness or octaves) ? Thanks!!
-
I've laid out UV's procedurally in Houdini with the sweep or skin sop and using arclen on the input curves, but I'm wondering if there is a solution to straighten/unwrap geometry that is generated in ways other that using a sweep or skin SOP. If anyone is familiar with the Unfold Strip from Loop button in 3dsMax's Unwrap UV modifier it basically takes any edge or loop input and straightens out the geometry into a strip. It's super useful for cylinders and chamfered/extruded edges. I'm wondering if there is a workflow to do something similar in Houdini. I tried messing with the new FlattenUV node and I can get something kind of close with the enable loop straightening, but the UV's are still wobbly and not perfectly straight.