Search the Community
Showing results for tags 'shapes'.
Found 5 results
-
Hey all, I got super excited on this image and started to make something based on it And now I'm reaching out for some guidance. Attached is where I was heading... still not getting the nice symmetry and variety that the image has. Any help would be appreciated thanks! cube_v001.hipnc

-
Hey all, I got super excited on this image and started to make something based on it. And now I'm reaching out for some guidance. Attached is where I was heading... still not getting the nice symmetry and variety that the image has. Any help would be appreciated thanks! cube_v001.hipnc

-
Hi everyone, I would like to know if you have any ideas how to create nice UVs between morphing shapes. Enclosed I have created two ways to do that, but with the first one, I have a strange frange between my UVs and with the second, it is a little bit blurred. Thank you for your future tips and tricks! Sylvain. PS: It's for my school short movie. fusion_uv.hipnc
-
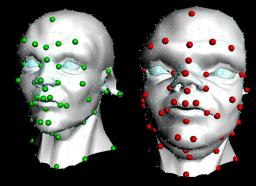
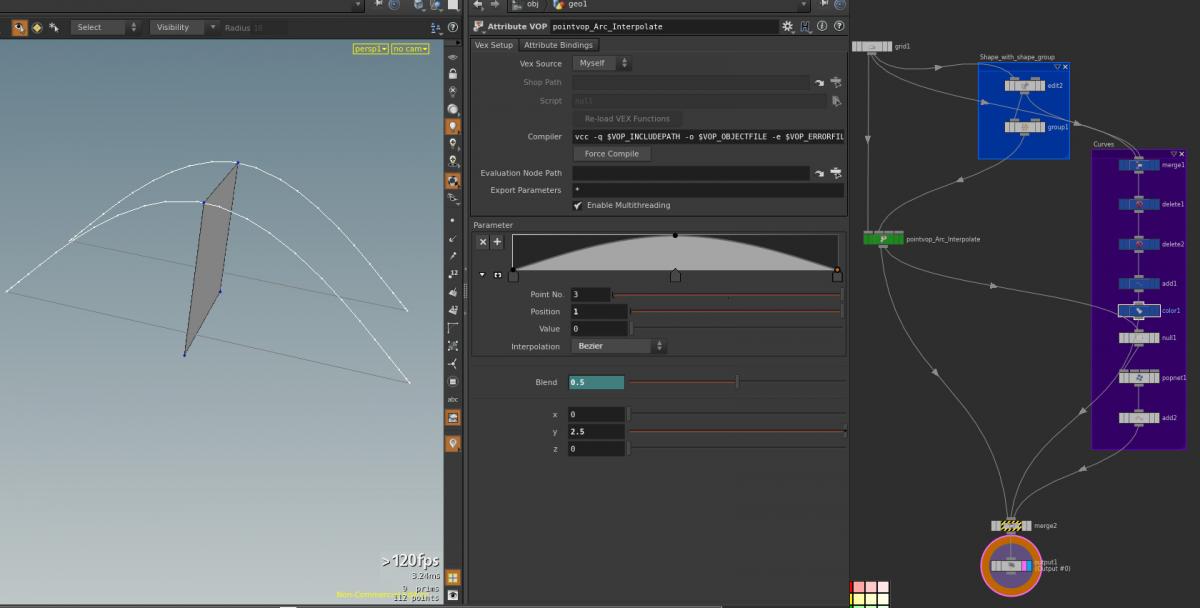
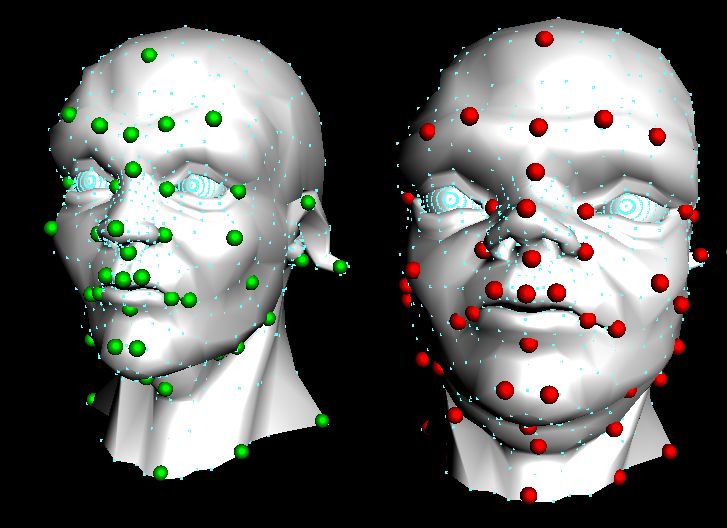
I tried to rebuild the awesome arc interpolated shaped tool that Ahmidou Lyazidi did in Softimage a long time ago. This is very useful to remove the linear motion of face shapes without a complex rig setup. I just need to find a more elegant way to display the vectors, as well as isolating all the shape points from the static ones to group them. Please have a look and let me know how I can improve this. Here is the old video by Ahmidou https://vimeo.com/8637260 Arc_Interpolate_101_wz.hipnc

-
Hi all, Been away for so long, this is my first post in some years I believe. Anyway I was at a Houdini event the other day and they were talking through all the great new features in Houdini 13 and beyond and I noticed on one of the slides that numpy is now included in Houdini since 12.5 or even earlier. It's been so long since I delved into Houdini that this massively useful fact had totally passed me by. The first thing that lept into my head when I saw this was my old HDK sop RBF morpher which is a totally awesome deformer that has gotten me out of so many tricky deformation scenarios over the years. Finally I realised I could re-write this in a Python sop and not have the issue of people needing to compile it to use it. A few days later and after a couple of hours work here is the result. No error checking yet just the bare bones of the functionality. Of course it's no where near the speed of the HDK one, but hey at least compilers aren't an issue with this one. This is the source code and I've attached a example hip file and otl, non-commercial versions. # This code is called when instances of this SOP cook. import numpy as np import math node = hou.pwd() geo = node.geometry() inputs = node.inputs() kernel = node.parm('kernel').eval() power = node.parm('power').eval() scale = node.parm('scale').eval() def linear(r): return r def smooth(r): return r*r*math.log1p(r*r) def cube(r): return r*r*r def thinPlate(r): return r*r*math.log1p(r) def sqrt(r): return math.sqrt(r) def pow(r): return math.pow(r,power) kernels = {0: linear, 1: smooth, 2: cube, 3: thinPlate, 4: sqrt, 5: pow} def rbfU(r): return kernels[kernel](r) if len(inputs) > 2: featureGeo = inputs[1].geometry() targetGeo = inputs[2].geometry() numFeaturePoints = len(featureGeo.iterPoints()) matrixQ = np.zeros((numFeaturePoints,4)) #setup all the matrices with the feature point positions i = 0; for p in featureGeo.points(): matrixQ[i,0] = p.position()[0] matrixQ[i,1] = p.position()[1] matrixQ[i,2] = p.position()[2] matrixQ[i,3] = 1 i += 1 #print matrixQ matrixQtranspose = matrixQ.transpose() #print matrixQtranspose matrixK = np.zeros((numFeaturePoints, numFeaturePoints)) #scale = 1 for row in range(numFeaturePoints): for col in range(numFeaturePoints): ppt = featureGeo.iterPoints()[row] p1 = ppt.position() ppt = featureGeo.iterPoints()[col] p2 = ppt.position() p = p1-p2 matrixK[row,col] = rbfU(p.length()/scale) #print matrixK #setup the final set of linear equations in one massive matrix matrixA = np.zeros((numFeaturePoints+4, numFeaturePoints+4)) for row in range(numFeaturePoints): for col in range(numFeaturePoints): matrixA[row,col] = matrixK[row,col] for row in range(numFeaturePoints): for col in range(numFeaturePoints, numFeaturePoints+4): matrixA[row,col] = matrixQ[row,col-numFeaturePoints] for row in range(numFeaturePoints, numFeaturePoints+4): for col in range(numFeaturePoints): matrixA[row,col] = matrixQtranspose[row-numFeaturePoints,col] #print matrixA #setup the solutions to all the linear equations, i.e. the target feature positions targetX = np.zeros((numFeaturePoints+4)) targetY = np.zeros((numFeaturePoints+4)) targetZ = np.zeros((numFeaturePoints+4)) i = 0; for p in targetGeo.points(): targetX[i] = p.position()[0]; targetY[i] = p.position()[1]; targetZ[i] = p.position()[2]; i += 1 #solve the linear equations to find the weights that map the features to the targets weightsX = np.linalg.solve(matrixA, targetX) weightsY = np.linalg.solve(matrixA, targetY) weightsZ = np.linalg.solve(matrixA, targetZ) #print weightsX #apply the weights to the actual points on the input geometry to get the final resulting positions relative to the target feature points NfPts = numFeaturePoints for opt in geo.points(): outX = weightsX[NfPts]*opt.position()[0] + weightsX[NfPts+1]*opt.position()[1] + weightsX[NfPts+2]*opt.position()[2] + weightsX[NfPts+3]; outY = weightsY[NfPts]*opt.position()[0] + weightsY[NfPts+1]*opt.position()[1] + weightsY[NfPts+2]*opt.position()[2] + weightsY[NfPts+3]; outZ = weightsZ[NfPts]*opt.position()[0] + weightsZ[NfPts+1]*opt.position()[1] + weightsZ[NfPts+2]*opt.position()[2] + weightsZ[NfPts+3]; p1 = opt.position() i = 0 for p2 in featureGeo.points(): p = p1-p2.position(); rF = rbfU(p.length()/scale); outX += weightsX[i]*rF outY += weightsY[i]*rF outZ += weightsZ[i]*rF i+=1 opt.setPosition((outX,outY,outZ)) [/CODE] ExampleRBF.hipnc RBFmorpher.otl