Search the Community
Showing results for tags 'ik'.
Found 6 results
-
Hello guys, I tried to rig a curve using KineFX and as you can see in the image below, the root joint does not fully rotate. How can I fix it? Thanks for helping. fullbodyik.hip
-
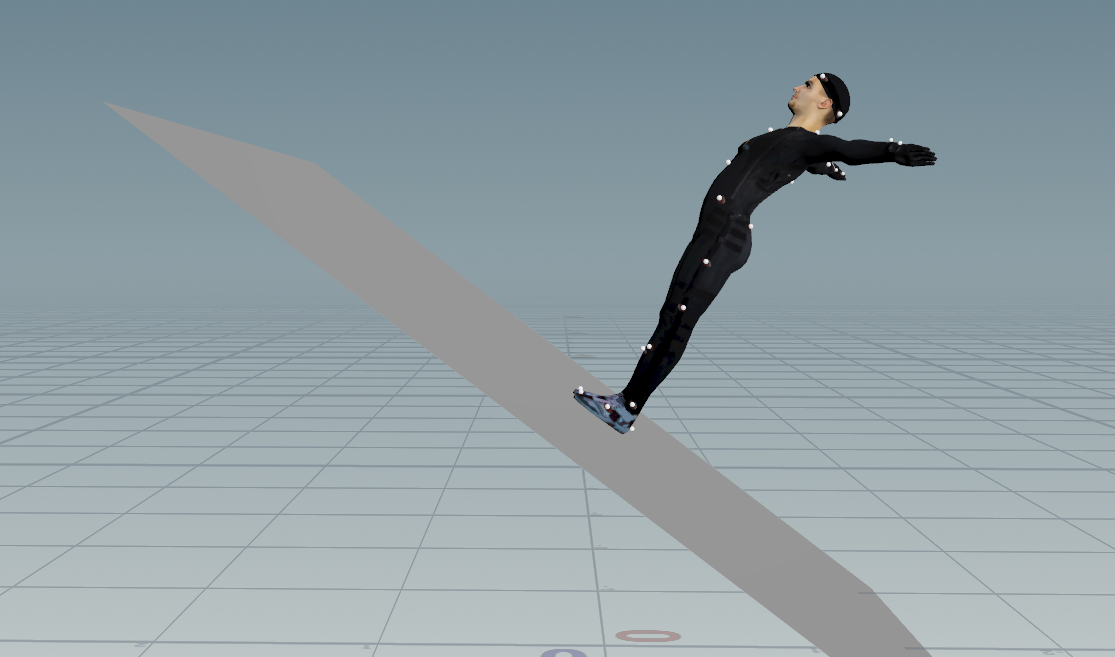
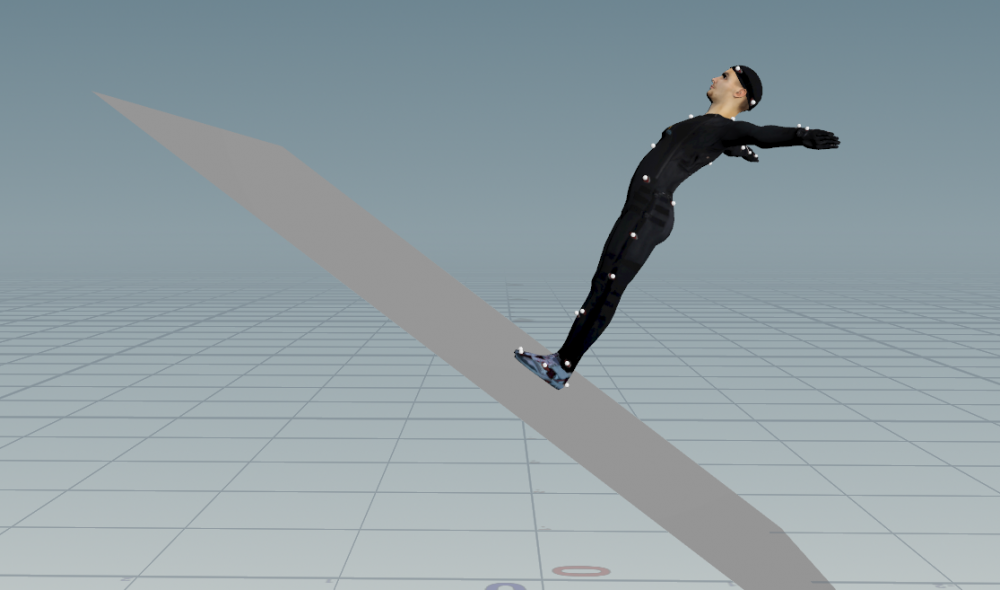
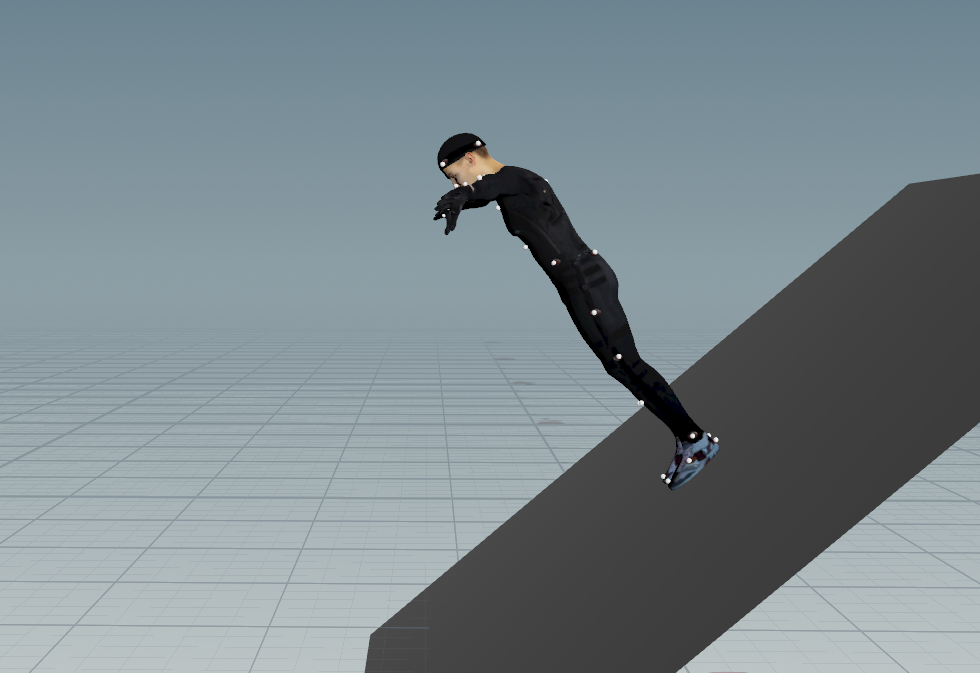
^This is what I'm going for. I'm trying to follow the guide here: https://www.sidefx.com/docs/houdini/character/kinefx/retargetcleanup.html , specifically Example 4: Making a character appear to move and balance on a platform. However, the character seems to be doing almost the opposite of what I would expect. The feet stay planted on the platform, but the upper body leans into the motion even further rather than leaning to counterbalance the lower body. The guide's setup seems very straightforward, and from what I can tell mine is essentially the exact same. I've tried switching out the character, but haven't gotten better results. Is there something I've missed? (The model is Passive Marker Man from Mixamo, but I don't want to upload it for copyright reasons. You can just switch out the model with any rigged fbx though, and reselect the foot joints in the deletejoints1 and fullbodyik1 nodes.) Balance.hipnc
-
Hi all, I am quite new to Houdini so please excuse me if the answer is super simple. Been trying to learn how to rig a little lately with small industrial robots (3DOF) FK systems are simple enough to implement however, I want to create a simple 3 bone IK rig with each bone only given a single rotational axis of freedom. i.e. bone1 one can only rotate around x axis, bone2 - y axis, bone3 - z axis to reach a single goal. Is this possible? I hope this can lead me down the path to creating "simple" IK rigs for Industrial robots with 6DOF (but I am dreaming here). I saw Maya already has a plugin for this sorta thing called Mimic, open source and quite elegantly done > https://www.mimicformaya.com/ I was wondering if its possible to build similar functionality within Houdini.
-
 Hi Everyone, I hope you can help me with this because I'm really interested in how to fix this. In short, I would like to know how to stop the bones from twisting 180 degrees when their goal null is pushed beyond their base's coordinate. The attached scene is using an off the shelf "IK with constrains" rig with only two bones. "Bone 1" I only want to be able to rotate on the x axis (y and z angle ranges are set to zero) and on x only in a -20 and +20 degree range, so I've set all these. But when I push the goal null on the Z axis past the coordinate of the base of bone 1 (so grab the goal null and drag it past -5 on the Z axis) you will see that it is twisting 180 degrees and now facing the other (wrong) way and going on. So the angle range limit is working but I want to be able to make sure that the bones can not twist and go the wrong direction when pushed beyond the limits, they should only be able to move within their angle ranges and nothing beyond that. Any help or suggestion is greatly appreciated. IKproblem.hip
Hi Everyone, I hope you can help me with this because I'm really interested in how to fix this. In short, I would like to know how to stop the bones from twisting 180 degrees when their goal null is pushed beyond their base's coordinate. The attached scene is using an off the shelf "IK with constrains" rig with only two bones. "Bone 1" I only want to be able to rotate on the x axis (y and z angle ranges are set to zero) and on x only in a -20 and +20 degree range, so I've set all these. But when I push the goal null on the Z axis past the coordinate of the base of bone 1 (so grab the goal null and drag it past -5 on the Z axis) you will see that it is twisting 180 degrees and now facing the other (wrong) way and going on. So the angle range limit is working but I want to be able to make sure that the bones can not twist and go the wrong direction when pushed beyond the limits, they should only be able to move within their angle ranges and nothing beyond that. Any help or suggestion is greatly appreciated. IKproblem.hip -
I'm trying to export rotation for a couple of IK bones from chops. I've put down a MERGE node in CHOPS and bussed all the IK chops there. But the problem is it only cooks when I MM click on it. So I go inside chops, MM on it and go back out to my bones and presto, the IK rotations show in orange bkg in the rotation fields... But if I move the IK bone again, the merge node remains uncooked until I dive back in and MM click on it again. Funny thing if I enable export on a simple InverseKin it works properly.... but I need more than just one bone. Am I doing something wrong... or what's the best way to bounce all the IK rotations back to the bones. Thanks
-
Sorry, I am new to Houdini scripting What I want to do is to make a script that can animate a character. I would like to control the center of the character while fixing the foot on the ground with IK. How can I do that ? Thanks. Shihui