Search the Community
Showing results for tags 'solids'.
Found 5 results
-
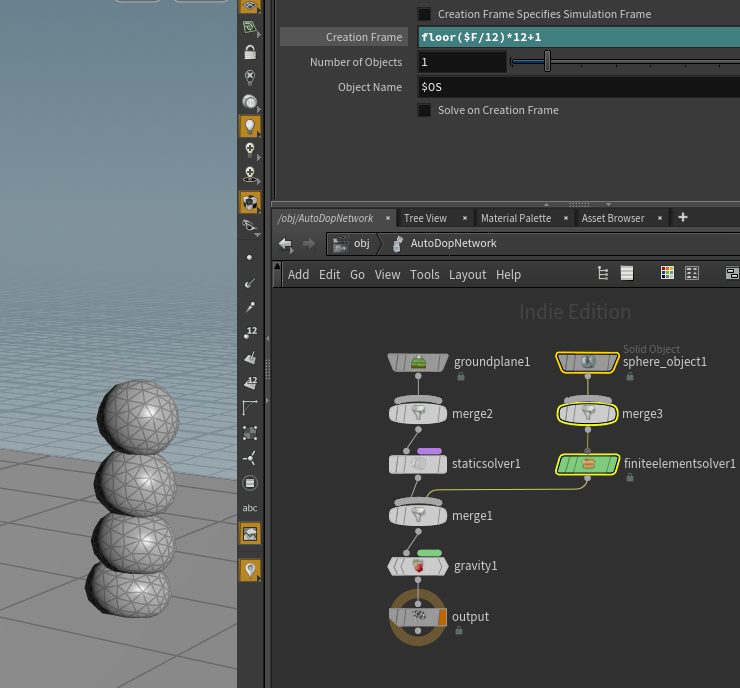
I've found that with finite elements(or cloth or wire) you can create multiple iteration of an geometry in a sim with the Creation Frame parameter. using floor($F/10)*10+1 see attachment I'm wondering if there is a way to do this with grain solids. I can add multiple pop source at the beginning of the sim but i would like to create a new Pop solid every 10 frames the way I can with FEM. I tried animating the impulse activate on the pop source and tried changing the activation parameter on the pop grains node. I'm guessing this is not really possible without multiple pop source nodes and point deform nodes. But maybe someone here has a solution. thanks
-
 I'm trying for the first time to work with gravity and various 'Solids' attributes (like organic mass/tissue etc) . I imported an object i worked on in Zbrush. Then worked out it needed to be a tet, so converted it using tetrahedralize. Now I get the error message you can see in the pictures that states "The selected mesh has no surface triangles" - but I converted it already! What am i doing wrong here? Any help would be enormously appreciated. Thank you very much in advance
I'm trying for the first time to work with gravity and various 'Solids' attributes (like organic mass/tissue etc) . I imported an object i worked on in Zbrush. Then worked out it needed to be a tet, so converted it using tetrahedralize. Now I get the error message you can see in the pictures that states "The selected mesh has no surface triangles" - but I converted it already! What am i doing wrong here? Any help would be enormously appreciated. Thank you very much in advance.thumb.png.51a5ec1c6a870f2d42ada365b795e280.png)
.thumb.png.7bf95d8402b5364d1310ad843cbce3d4.png)
-
Isn't it possible to constrain some arbitrary points of one solid object to the points of another one? The SBD seems to expect a matching set of points between the two objects, which I assume works well when the two object have tets that perfectly touch each other. Is there another way to attach two solids that slightly intersect? thanks
-
Hi, has anyone here in the forums used solids and the finite element solver to do large scale, production level destruction? I am doing some tests to determine whether we will be using it in a series of shots, but so far my simulations have been rather slow and unstable. My current test is a moving sphere moving through a section of a wall that has 4-5 different layers to describe the different materials (plaster, wooden beams, cement). I understand that sandwiching multiple objects together and forcing another object through is a very demanding task for the solver, so I am wondering it it is possible to simulate something like that with a reasonable turn around times? All the objects together have around 100k tets in total, I've set it to 25 substeps and 10 collision passes, in an attempt to make the simulation stable. Some frames took more than 45 minutes and even at these calculation times the simulation became unstable and ended up exploding a few frames after the impact. Is there anything obvious I am missing out in terms of simulation efficiency/stability, or is it just a matter of keep increasing the substeps? As a straight comparison I have Kali, the DMM engine from pixelux that I was using in MPC, where we were able to simulate a couple of hundred frames overnight with more than a million tets. Do you think there is such a huge difference between the two solvers? thank you georgios
-
Short animation i did last year about the Platonic Solids. Houdini for all the VFX; rendered with Mantra. Let me know what you guys think Cheers! http://cargocollective.com/pedrokobuti

.png.9926a9222ad16f3f399a8669f4a5aaaa.png)
.png.e716b96daa112451fdb997d7d5a92147.png)