Search the Community
Showing results for tags 'dynamic'.
-
Hey I'm new to Houdini so I followed a couple of tutorials to create the effect that I wanted (listed below) To create the effect: https://forums.unrealengine.com/t/vat-dynamic-remeshing-from-houdini-appears-corrupted-when-imported-to-unreal-5-2/2043193 And to export to Unreal: They look great until I use VAT Dynamic Remeshing to export it and bring it into Unreal engine... In houdini: In Unreal Engine As far as I can tell I did everything correctly and there don't appear to be any errors in Houdini or Unreal. So I’m not sure why the mesh looks so corrupted. Anyone have any ideas what's going wrong or what I can try? Thanks!
-
I have an AutoDOP Network that I am trying to select for 'heat within object' feature. No matter how much I try to click and select, drag a window around it, it doesn't get selected. What should I do? Sharing a screenrecording of what I face. selection issue.hip
-
Hi guys, I know how to use pre-fractured objects in an RBD simulation, but is there any workflow for Dynamic Fracturing? Thanks for helping.
-
Hi, I want to make an HDA that can import several file, but this should be dynamic. So I can import one o thousends of files if I want. How can I achive this? Thanks, D.
-
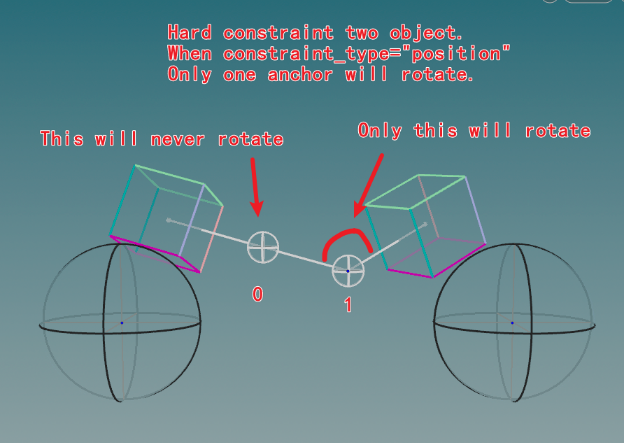
Hi I just want to confirm if my understanding is correct. Basically in a simply scene like this. Two object hard constraint together with two anchors in between. When constraint_type = "position", only one anchor should rotate. Simply because only two object involved, if they are constraint by one line, they should rotation around one point. If we want to achieve effect of box rotate around two anchors, there has to be a third object in between. Otherwise there will only be one anchor rotate. The other one will never rotate in constraint_type = "position" mode. I'm not sure my understanding is correct, can someone confirm this? Thank you.
-
I need to create a HDA with uisoparm handle which will be show/hide on hotkey, and dynamically tune different parameters in my hda. For example by pressing some hotkey it will tune param0, and after pressing same hotkey it will tune param1, etc... The problem is that I can't understand why uisoparm handle doesn't shows in viewport after its creation. Another handles like circle, xform, vector works fine. template.bindHandle("circle", "my_handle") But uisoparm handle doesn't appear in viewport , and I can't understand why here is example of my code. also I attached a hip file with hda. import hou import viewerstate.utils as su class State(object): def __init__(self, state_name, scene_viewer): self.state_name = state_name self.scene_viewer = scene_viewer self.node = None self.start_pt = None self.end_pt = None self.displayRotHandle = True self.start_handle = hou.Handle(self.scene_viewer, "rotate_start") self.end_handle = hou.Handle(self.scene_viewer, "rotate_end") self.displayCarveHandle = True self.carve0_handle = hou.Handle(self.scene_viewer, "carve_0") self.carve1_handle = hou.Handle(self.scene_viewer, "carve_1") def onEnter(self, kwargs): self.node = kwargs["node"] # rotation handles init self.start_handle.disableParms(["tx", "ty", "tz", "rx", "rz"]) self.end_handle.disableParms(["tx", "ty", "tz", "rx", "rz"]) self.start_handle.show(True) self.end_handle.show(True) self.start_handle.update() self.end_handle.update() self.displayRotHandle = True # carve handles init self.carve0_handle.show(True) self.carve1_handle.show(True) self.carve0_handle.enableParms(["input", "k","onoff"]) self.carve1_handle.enableParms(["input", "k","onoff"]) self.carve0_handle.update() self.carve1_handle.update() self.displayCarveHandle = True self.start_pt = self.node.node("start_pt").geometry() self.end_pt = self.node.node("end_pt").geometry() def onMouseEvent(self, kwargs): """ Find the position of the point to add by intersecting the construction plane. """ ui_event = kwargs["ui_event"] device = ui_event.device() origin, direction = ui_event.ray() return True def onKeyEvent(self, kwargs): ui_device = kwargs["ui_event"].device() self.key_pressed = ui_device.keyString() if self.key_pressed == "a": if self.displayRotHandle == True: self.scene_viewer.showHandle("rotate_start", 0) self.scene_viewer.showHandle("rotate_end", 0) self.scene_viewer.showHandle("carve_0", 0) self.scene_viewer.showHandle("carve_1", 0) self.displayRotHandle = False else : self.displayRotHandle = True self.scene_viewer.showHandle("rotate_start", 1) self.scene_viewer.showHandle("rotate_end", 1) self.scene_viewer.showHandle("carve_0", 1) self.scene_viewer.showHandle("carve_1", 1) return True def onHandleToState(self, kwargs): # Called when the user manipulates a handle handle_name = kwargs["handle"] parms = kwargs["parms"] prev_parms = kwargs["prev_parms"] node = kwargs["node"] if handle_name == self.start_handle.name(): # user manipulates rotation start handle node.parm("rot_start").set(parms["ry"]) if handle_name == self.end_handle.name(): # user manipulates rotation end handle node.parm("rot_end").set(parms["ry"]) if handle_name == self.carve0_handle.name(): # user manipulates carve 0 handle node.parm("carve_0").set(parms["k"]) node.parm("first_u").set(parms["onoff"]) if handle_name == self.carve1_handle.name(): # user manipulates carve 1 handle node.parm("carve_1").set(parms["k"]) node.parm("second_u").set(parms["onoff"]) def onStateToHandle(self, kwargs): # Called when the user changes parameter(s), so you can update dynamic handles if necessary handle = kwargs["handle"] handle_parms = kwargs["parms"] node = kwargs["node"] if self.start_pt != None: pos_start = self.start_pt.point(0).position() else: pos_start = [0.0, 0.0, 0.0] if self.end_pt != None: pos_end = self.end_pt.point(0).position() else: pos_end = [0.0, 0.0, 0.0] if handle == "rotate_start": handle_parms["tx"] = pos_start[0] handle_parms["ty"] = pos_start[1] handle_parms["tz"] = pos_start[2] if handle == "rotate_end": handle_parms["tx"] = pos_end[0] handle_parms["ty"] = pos_end[1] handle_parms["tz"] = pos_end[2] if handle == "carve_0" : handle_parms["k"] = 0 if handle == "carve_1" : handle_parms["k"] = 1 def createViewerStateTemplate(): """ Mandatory entry point to create and return the viewer state template to register. """ state_typename = kwargs["type"].definition().sections()["DefaultState"].contents() state_label = "Denis test dynamic handle" state_cat = hou.sopNodeTypeCategory() template = hou.ViewerStateTemplate(state_typename, state_label, state_cat) template.bindFactory(State) template.bindIcon(kwargs["type"].icon()) template.bindHandle("circle", "rotate_start") template.bindHandle("circle", "rotate_end") template.bindHandle("uisoparm", "carve_0", "ownerop('carve_0') owneropgroup('group')", cache_previous_parms=True, handle_parms=["input", "k","onoff"] ) template.bindHandle("uisoparm", "carve_1", "ownerop('carve_0') owneropgroup('group')", cache_previous_parms=True, handle_parms=["input", "k","onoff"] ) return template carve_python_states_v01.zip
-
Hi everybody, I'm looking for a way how to create dynamic constraints with Bullet. The basic way doesn't work. Take a look at hip file please to see the problem. Any help would be appreciated! Thanks! bullet_dynamic_con_issue_v01.hip
-
Hi Houdini Magiciens Anyone know how i can do that ? I know how made tendril /anemone with hair but i don't find the way to made collisions like in this vidéo. It seems like cloth. Thanks a lot for your help !
-
Hi - I have a ship that is behaving nicely with pretty realistic buoyancy on a Houdini Ocean. I would like to outfit the ship with sensors that will give me their depth below the ocean surface at any given time. Any ideas how best to do that? Thanks!
-
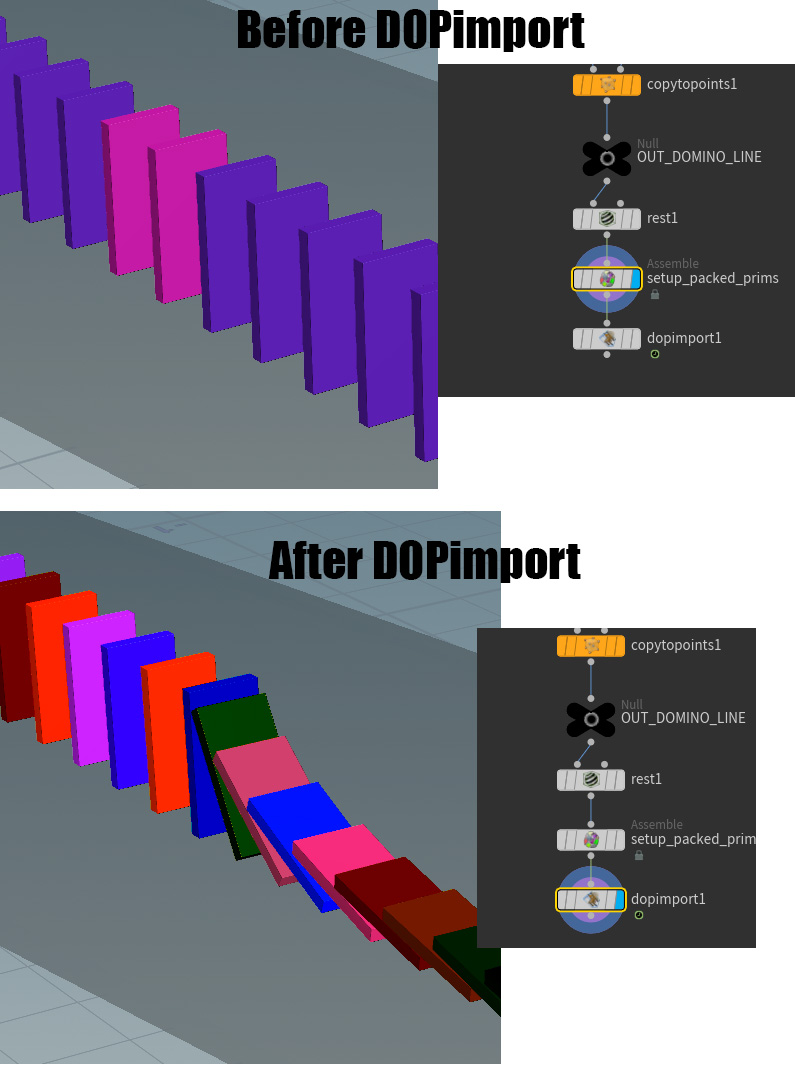
 Hi everybody, I'm a newbie here, I just discovered this Houdini forum today! Just to precise, I'm learning since only 4 months, it's an incredible 3d software but a little bit complex at the beginning... I've an unexpected problem: I've a rigid body simulation stored on my hdd where all are okay for me, and now I want to make the textures, but the DOPimport node keep the colors that were used during object creation!! You can watch it in the screenshot. Please, how can I change the color after the DOPimport node, or maybe how to keep the color of the Assemble node? (I'm working for a render with Mantra) Many (many!) thanks in advance for your tips/answers!
Hi everybody, I'm a newbie here, I just discovered this Houdini forum today! Just to precise, I'm learning since only 4 months, it's an incredible 3d software but a little bit complex at the beginning... I've an unexpected problem: I've a rigid body simulation stored on my hdd where all are okay for me, and now I want to make the textures, but the DOPimport node keep the colors that were used during object creation!! You can watch it in the screenshot. Please, how can I change the color after the DOPimport node, or maybe how to keep the color of the Assemble node? (I'm working for a render with Mantra) Many (many!) thanks in advance for your tips/answers!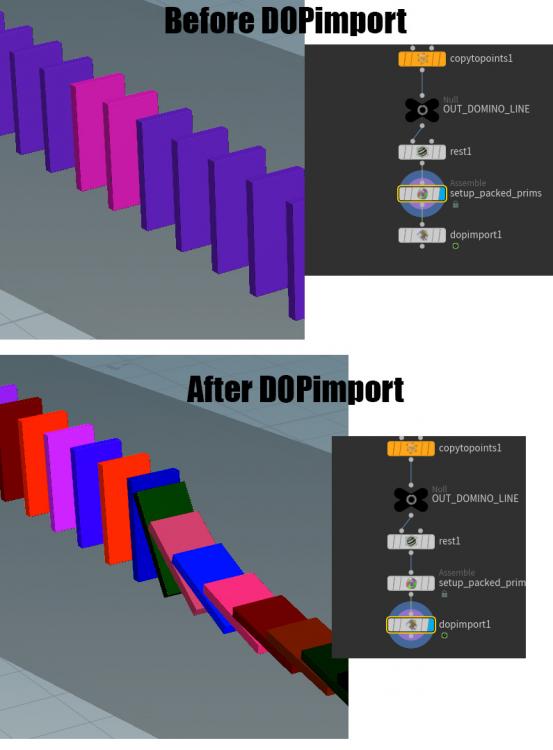
-
Hi, So I have a complex problem that I can't get to the bottom of. I have created trails using volume curl fields. I want it to look like a ball of synthetic down/woollen filling. Now I want this to be dynamic so if it laded on the floor it would have volume but if I use vellum hair it just falls flat because it is just a bunch of curves. Any ideas ? Thanks Andy
-
Hello Guys! Noob question... I have a character with modeled/sculpted hair, and I want to make it dynamic. The thing is. I´m using a spline for each hair chunk, and the vellum solver to make that spline dynamic. I like the motion I´m getting on the splines, but when I use the wire capture/wire deform combo, The mesh gets flattened. It follows the motion, but it looses all the volume/shape. Is there a way to keep the hair´s shape?? or am I trying to solve this the wrong way?? I hope the images below can show the issue. Thanks in advance! EM

-
A little experiment I like to nickname: 'Life as a VFX Artist'
-
Hello, I'm trying to create a dynamic constraint network, to achieve a kind of sticky wall. The basic concept is working but it is very "wobbly", it seems there is an offset or something else. I tried to scale the constraint primitive to zero and reduce the restlength without success. Is there another way to influence the constraints? debug.hiplc
-
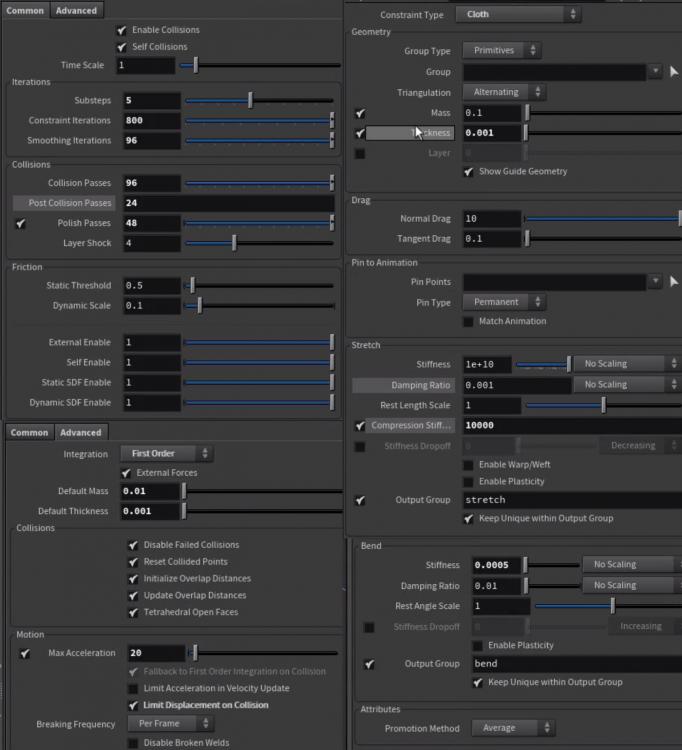
Hello all, A mocap actress walks catwalk style and turns around, walks backward, back and forth a few times. I'm so close to getting this to look very realistic but I am having trouble with self collisions bunching up the fabric. I attached an image of what my result issue looks like and the parameters I'm using. If it's not any of these causing it, could it possibly be my pin to animation constraint? It's the straight-forward Grouping Pts to pin and pinning to nearest on mesh in Permanent setting. Thank you for any advice. Sadly, I can't share the project file.

-
Looking for a talented Houdini artist who can do procedural text animations. We have an upcoming project that requires it. The resulting geometry should be dynamic, procedural, however, lightweight as it will be baked out and used on mobile devices. Please include links to any work you have done in this area, as it will help us filter down the candidates. Thanks!
-
Hello, I made a rigid body simulation where I have different kind of pieces, like pavement, road etc. I grouped them in a group called "group1" How can I write this in vex in pointwrangle? Take the group1 and if the points in group1 are under -1 in @P.y then delete them. Thank you for your help
-
Hi All, Wondering if someone could take a quick look. I'm having a hard time trying to get these dynamically created constraints to stick to this animated passive object. is my approach wrong ? What I'm trying to do is Have the sphere hit the wall, then pull away some pieces like its stuck to it. I've seen several approaches to this, but have not seen it done on a passive deforming mesh. Which is what the sphere is setup to be. Rich Lord has a some great examples of sticking constraints on fully dynamic meshes. any direction would be appreciated ! dynamic_constraints_deformingmesh_17.hip
-
I would like to know how to make the effect of the object go deconstructing gradually as the helmet of the star lord in Guardians of the Galaxy
-
Hello houdini wizards! I am playing with Vellum and trying to get the dynamic glue constraints to work. The documentation is about 1 very small section and I did what it said to (like creating the glue inside the solver and setting the Create Constraints drop down to Each Frame) but it does not grab the cloth. I played with distances and groups but no luck. I don't have a specific scenario at the moment so no scene file really that cant be set up in 2 minutes, just a grid as the cloth object, a sphere (fed into the collision input at the sop level) that dips down close the grid and then moves back up. The intention is to have constraints be created to grab the cloth within the set distance, pick it up, pull it, and then release/break the constraints when I want/need to. The breaking I can assume is pretty simple using the broken attribute in the Constraint Properties but I cannot seem to dynamically create constraints to grab the cloth/grid. Any help or knowledge you can give is much appreciated! I was unable to find any example files on the subject either but I did see the demo of it being done (https://vimeo.com/313872854) around 24:50. And again, thanks in advance for any advice you can give!
-
Hello there, Is there any way to create Geo dynamically inside a dopnet? Specifically, i would like to have growing tendrils, and simulate those as they are created using popgrains. I created a popwrangle inside my dopnet, and created new points and primitives through vex. Unfortunately, that breaks the pop solver, as its not solving the newly created particles (However, if I put a force after the popsolver it works). I thought maybe that resetting the id to -1 (as used in a similiar way with the bullet solver) would do the trick, but unfortunately not. Is there any way that I can force the popsolver to recognize those newly created particles? Thanks in advance, Bajt createGeoinPop_v01.hiplc
-
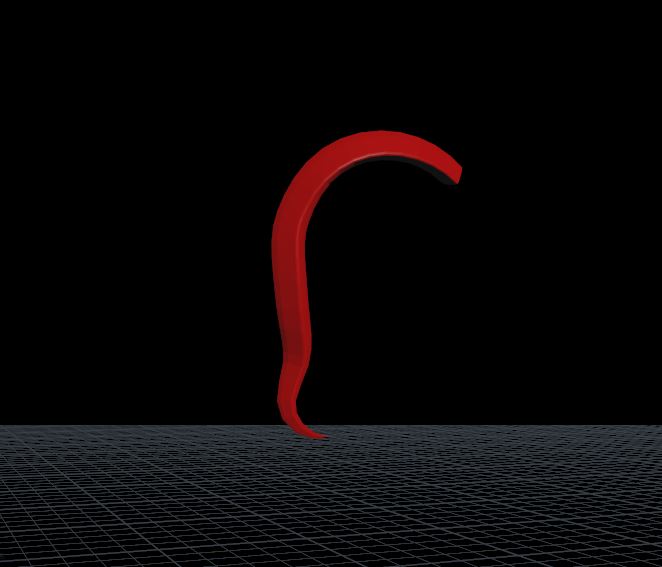
Hi, Currently banging my head against a brick wall on how to create a similar effect to the play-doh looking, growing worm things in this great Ditroit piece: Wondering if someone could give me a little nudge in the right direction? Or a good place to start looking? Up against it a little so don't have a huge amount of dev time! Cheers!
-
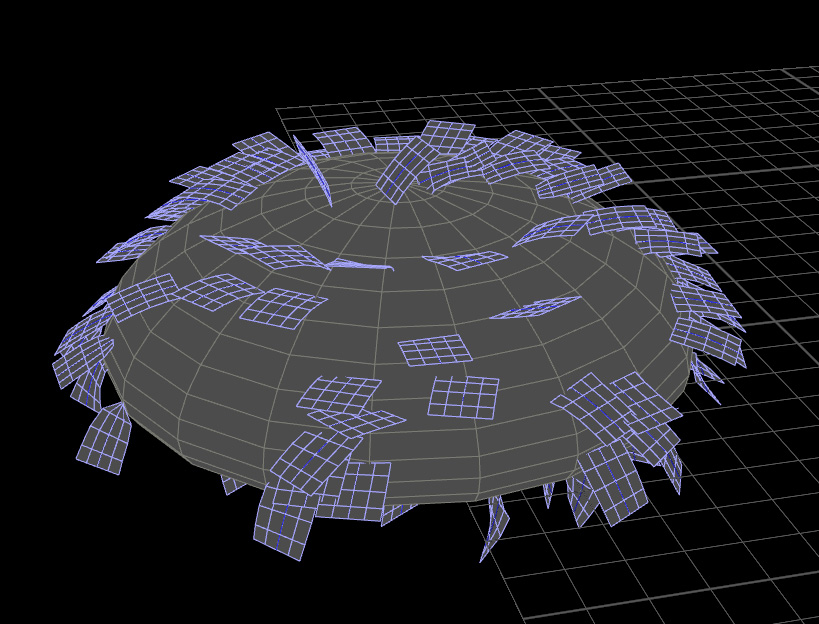
Hello everyone! Right now I'm in a process of doing feather system for my character. I'm doing it based on the fur system - I'm taking its guide curves and adding a sweep on them to get patches. Right now I'm working on orienting them right. When I get some decent result I'll show it, but for now I want to know, does any of you have some ideas of how to do feather system? Maybe someone already did one and know where to start?
-
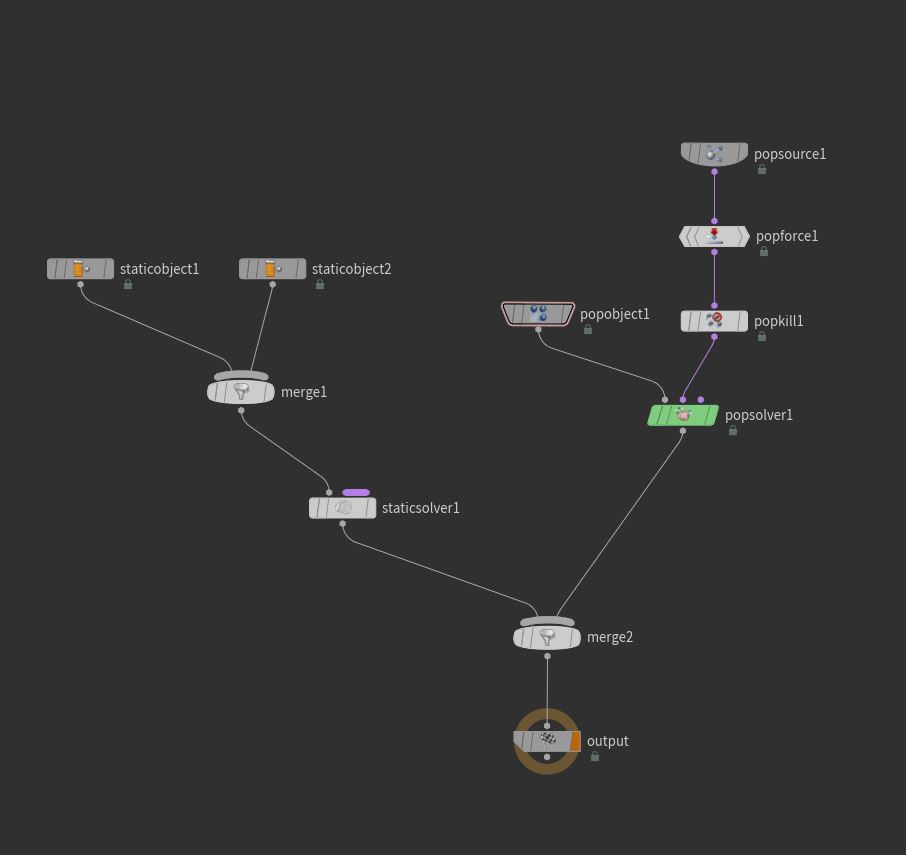
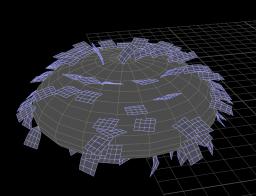
 Hi, I have a very simple DOP network with 2 static object colliders. (Houdini 16.5) In my scene, I'm instancing sphere on the particles from the DOP simulation. The spheres are instanced perfectly to the particles of the dynamic sim, but they are also wrongly getting instanced on each verts/points of my collider objects (the 2 staticobjects on the top left). My instancer node in the scene is set to "full point instancing" (in the point instancing option), which could be the problem, but that is the only option that instances the spheres to my partciles. Any tip would be greatly appreciated. Thanks
Hi, I have a very simple DOP network with 2 static object colliders. (Houdini 16.5) In my scene, I'm instancing sphere on the particles from the DOP simulation. The spheres are instanced perfectly to the particles of the dynamic sim, but they are also wrongly getting instanced on each verts/points of my collider objects (the 2 staticobjects on the top left). My instancer node in the scene is set to "full point instancing" (in the point instancing option), which could be the problem, but that is the only option that instances the spheres to my partciles. Any tip would be greatly appreciated. Thanks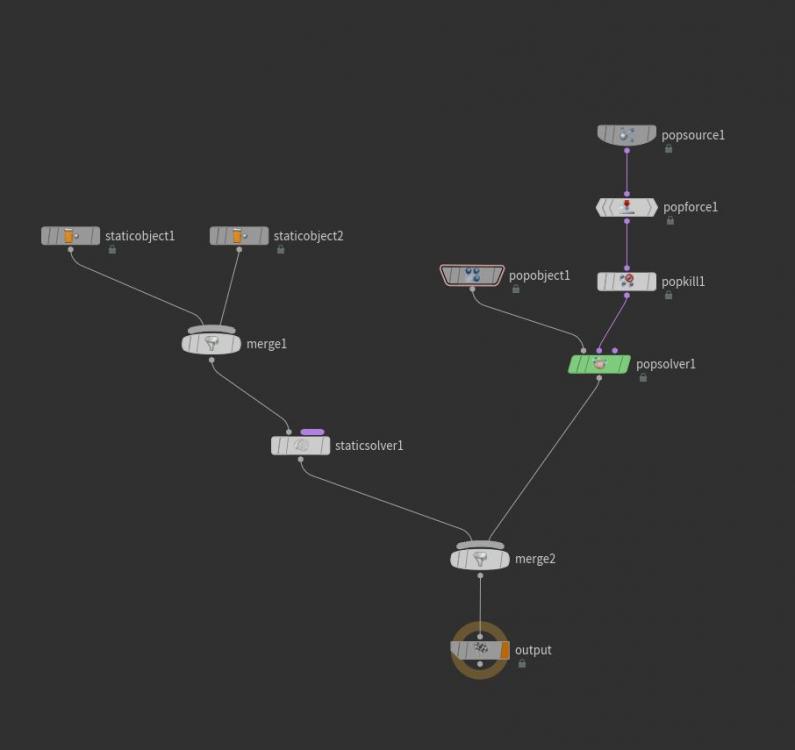
-
Hi, i'm working on an explosion scene with pyro that existing from pop trails. but when i simulating my pyro, the area of sim is going bigger so much and killing me. i think there is a way like on that video is there any way to make multi containers like clustering my rbd explosion as like that for speed up sim? i attached the hip file that i found on web and learning from it. Rbd_Explosion_With_Smoke.hip