Search the Community
Showing results for tags 'wrangler'.
Found 6 results
-
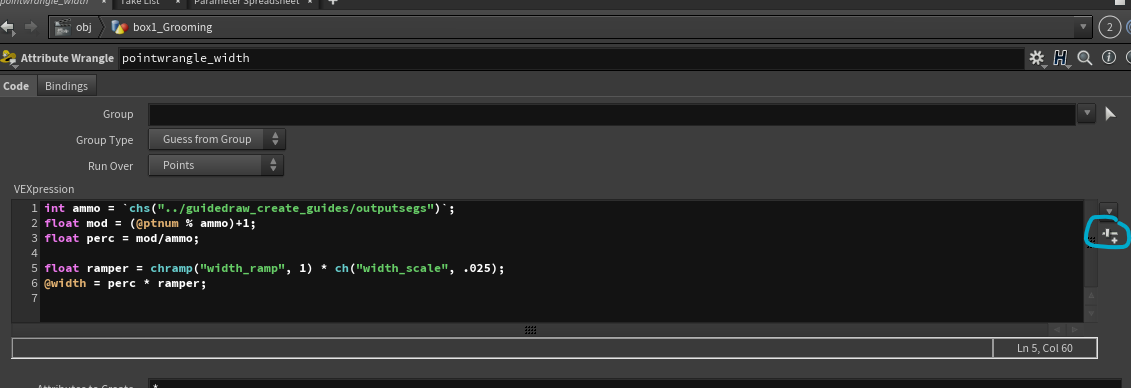
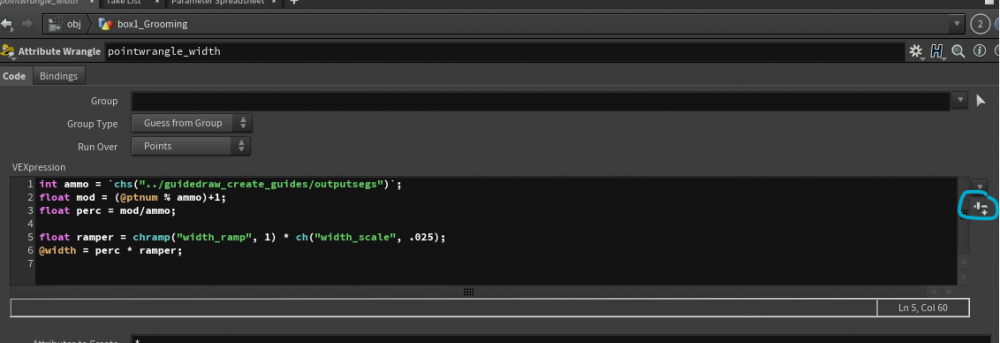
i am creating a attribute wrangler and will create 2 params, from the UI i can click that little icon and will create it for me, super easy. I did try to to grab the param and press "push button" h=hou.node('/obj/box1_Grooming/pointwrangle_width') ex=h.parm("exportlist") hou.Parm exportlist in /obj/box1_Grooming/pointwrangle_width> ex.pressButton() but nothing happen =( i inspect the button via "edit parameter interface" to see if there was a code or a callback attach to it,but didnt find anything... =( how could i create those params?
-
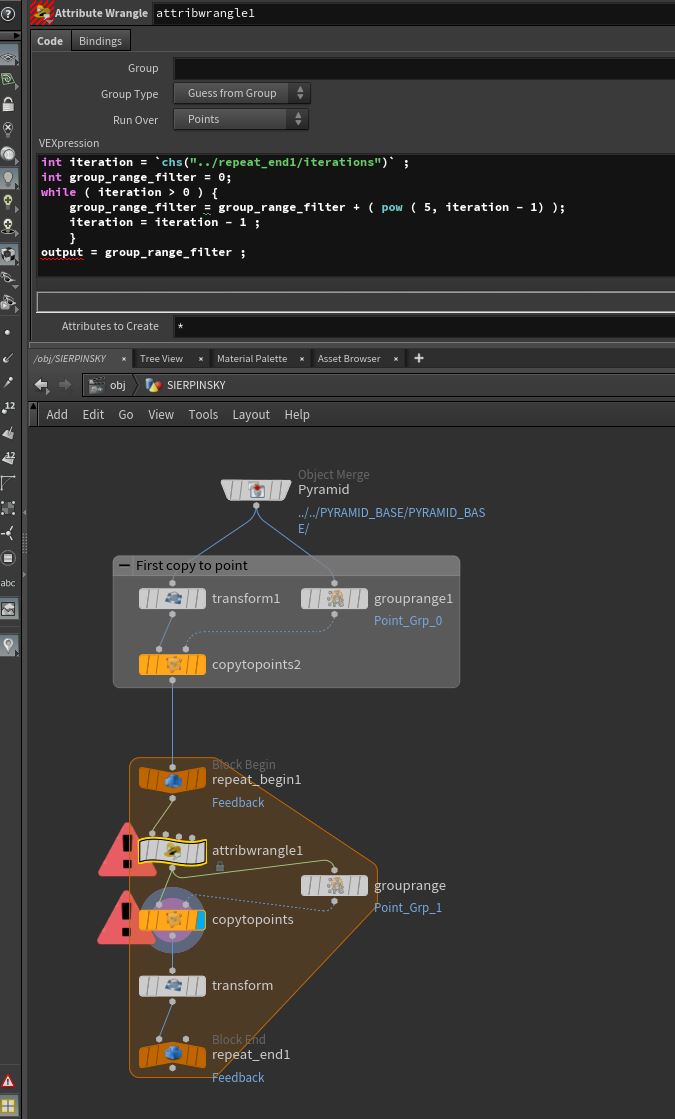
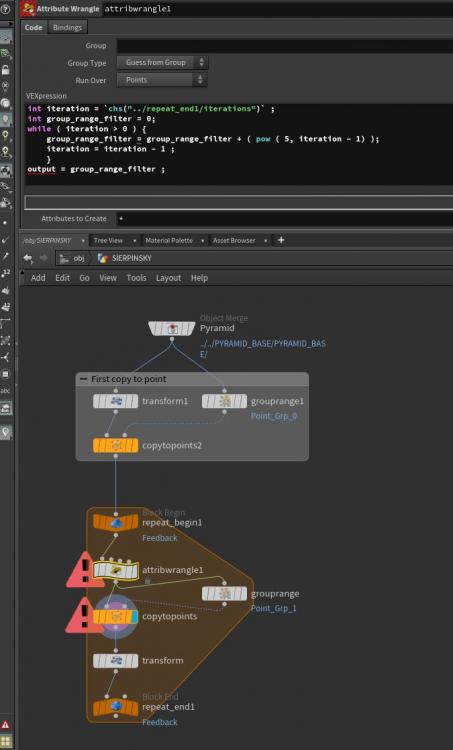
Hi, I'm trying to do a Sierpinski pyramid. So I quickly made a pyramid, copied this pyramid to it's 5 outers point. At this point I thought "why not make a loop", but here comes my first problem. I needed to select only the outer points, no matter how many iterations I put. So I've made an group range. But this group range has to be updated each iterations, because the "selecttotal1" will change depending on how many point is on the geo. I've made a quick code in an attribute wrangler to retreive this value, using the repeat_end's iterations. But now I can't find a way to use my variable as a parameter for my group range. Is there a way to output a variable in an attribute wrangler so I can use it on another node as a parameter ? If so can someone explain me ? (I'm not that good in code btw so I would be kind of you to explain what does a potential code work )
-
I set up a scene with crates that I want to get destroyed by a flip sim. figured out that I had to put a attribwrangle with i@bullet_sleeping = 1; so that RBD stays in place until the FLIP collides. The problem is now that with a little hit of flip to a group of crate the push activates all of them to break. I am a noob, but found that there is a threshold to control the amount of impact to activate the RBD. I just dont know which one of these it is and how to apply it to wrangler. bullet_angular_sleep_threshold bullet_ignore bullet_linear_sleep_threshold Documentation found here : https://www.sidefx.com/docs/houdini17.5/nodes/dop/rbdpackedobject.html Here is the original failed vid: https://www.dropbox.com/s/dl8ze5rv4vf6gse/Test.mp4?dl=0 Here is current failed test vid: https://www.dropbox.com/s/sa4sumxfqpqmdhq/Flud Test2.mp4?dl=0
-
Hi, I compute the velocity on an animated point and I copy a geometry on it which inherits the velocity but of course is not correct as every point now has the exact same vector. How can I realign the existing velocity in the geometry using vex without having to recompute it? I have attached an example hip. orientvelocity.hipnc
-
Hey everyone, I'm starting my houdini journey because the company I'm going to intern at in the summer does a lot of houdini stuff. I don't want to be left in the dark, so I'm studying on my own for now. When I was at the company in question, last time, someone showed me a way to use a volume from a mesh (he used the test_rubbertoy geo) to get a intersection plane without using boolean. I remember he used some wranglers, and ended up with a grid with color data which he used to delete the unnessecary parts outside the colored intersection area. Then he somehow turned the mesh into a isosurface, to smooth it out. I've been trying this for some time now and I can't for the life of me figure out how he did it. I've had two nearly succesful attempts, one where I used the Intersection Analysis to get the intersection between a grid and the (rubbertoy -> vdb -> vdb to poly (to fuse seperate meshes together)), then filled the edges I got from that, and then remeshed, which admittedly gets me at least a flat intersection plane. One major problem is that this approach makes the normals of the resulting mesh flip upside down randomly everytime I move the intersecting mesh, which is a pain if you'd want to use it for particles or something. I tried using a wrangle to copy the point normals of the nearest points to the points of the remesh, but I haven't had much luck with that. The other thing is that since the Intersection Analysis only returns edges, the shape of the surface is not taken into account, above method only returns planes and distorted planes on surfaces. The other one I used a attribute transfer with a (mesh -> vdb fog -> wrangle to fit density to 1 everywhere -> scatter -> color {1,0,0}) to project red points from the point cloud to a grid surface, which works, but VERY slowly. one bonus with this technique is that you can blur the resulting "intersection" but its way too slow. So, what I've been thinking is this: A VBD is basically a point cloud, so there needs to be a way to compare mesh points to the points in the volume, and assign a color to those points that are close to points on the geo. I remember said someone doing something like that with a pcopen, but I don't really understand how. I think I get the method, but if someone knows something better, please say so. I've been struggling with this for a couple of weeks now. I strive to be more than a shelf tool user, at the least. Thanks in advance, sasbom
-
TRIXTER is currently looking for a Render Wrangler. Description: The After Hours Render Wrangler & IT Support position is a part-time but mission critical role to offer both after hours IT support and assist in the effective use of the computing resources (renderfarm) utilized in rendering computer generated images for our active projects. To start as soon as possible. Long-term contract. Primary Responsibilities: - Monitor, manage and keep the renderfarm running at maximum capacity - Monitor jobs on the “Pixar Tractor” render manager: identify stalling jobs, follow up and report failed jobs to artists/Production. - Check and re-start failed render tasks. - Update and maintain Render Manager job priorities according to instructions from Production. - Monitor disk space usage and flag high disk or network usage over-night. - Restart unreliable blades and report them to the IT as necessary for later diagnosis. - Provide first level technical support to artists and production team members working after - Provide additional information to, and where required, liaise with the IT team to assist in trouble-shooting larger technical issues. Required Skills & Experience: - A focus in Computer Science/Engineering as an undergraduate is a major plus. - Experience with Linux/UNIX, in particular the shell environment and navigating through the file system is a requirement. - Experience and/or interests in any of thefollowing IT technologies is a benefit: ZFS, Layer 2 Networking, esxi, vsphere, pfsense, RHEL, iSCSI, git, rpm, Bacula, NFS, SMB, python, Asterisk, Ansible, Graphite, Nagios, Observium, Cacti, Solaris, bash, csh. - Excellent communication skills, both verbal and written - Good organizational skills and attention to detail - Ability to handle a fast paced, occasionally high pressure environment - Ability to work well both independently and as part of a team - Willingness to work very flexible hours, including weekends and/or evenings. Please send your CV and your earliest commencement date by email to Laila.sleiman@trixter.de and/or jobs@trixter.de We are very much looking forward to meeting you! www.trixter.de