Search the Community
Showing results for tags 'pcopen'.
Found 10 results
-
is there anyone to know the workflow of pcopen and iterate with new houdini version?
-
why it gives me this error? and how to solve that?
.thumb.png.db090f55b8b55a388ed86a0b457cb401.png)
.thumb.png.ef816248592ebe96e3d3d85ecba06008.png)
-
Hi everyone, I have a little confuse about pc open. Normally we create a pc open need a current element "P" to be the query position. and then search the target file by radius. but what if i create pc open in cvex shader builder to work with vex volume procedural in Shop. where is the current P comes from? we still need a "P" to be the query position to do searching. (plz let me know if I'm wrong thx) if I connect pc open query pos to geo vop global parameter "P" then do the rest of part. although it still work but no idea how. and I don't know how to export the parameters to check on the spread sheet.
-
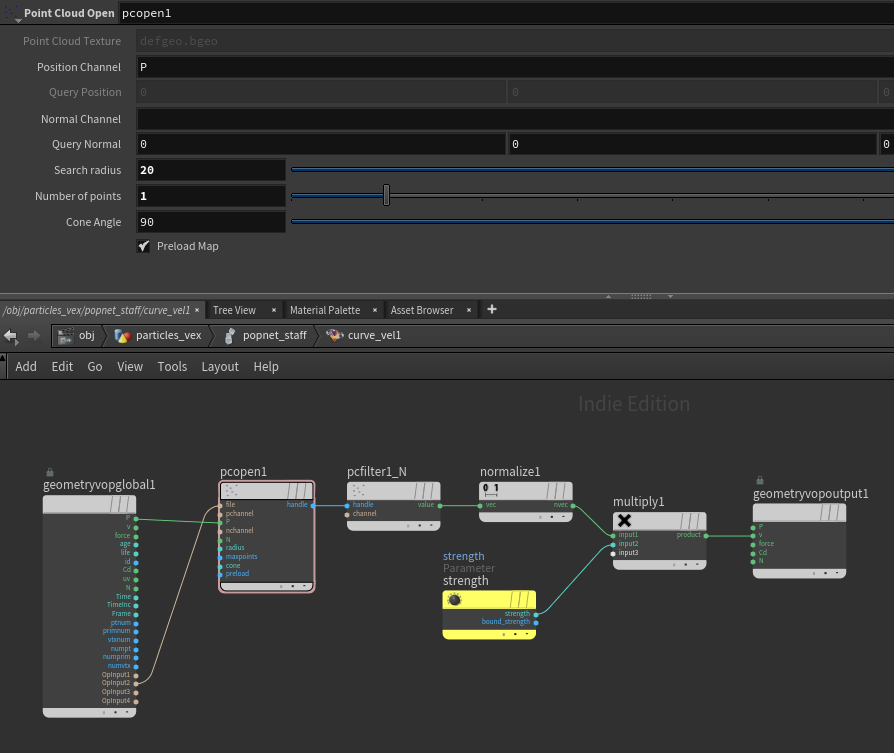
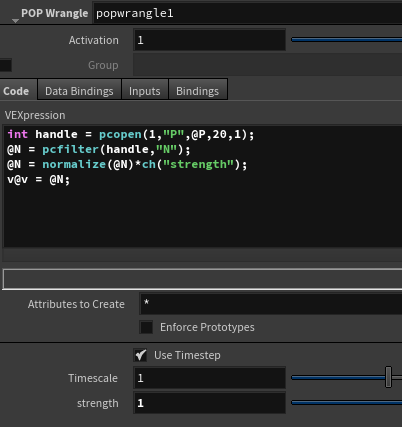
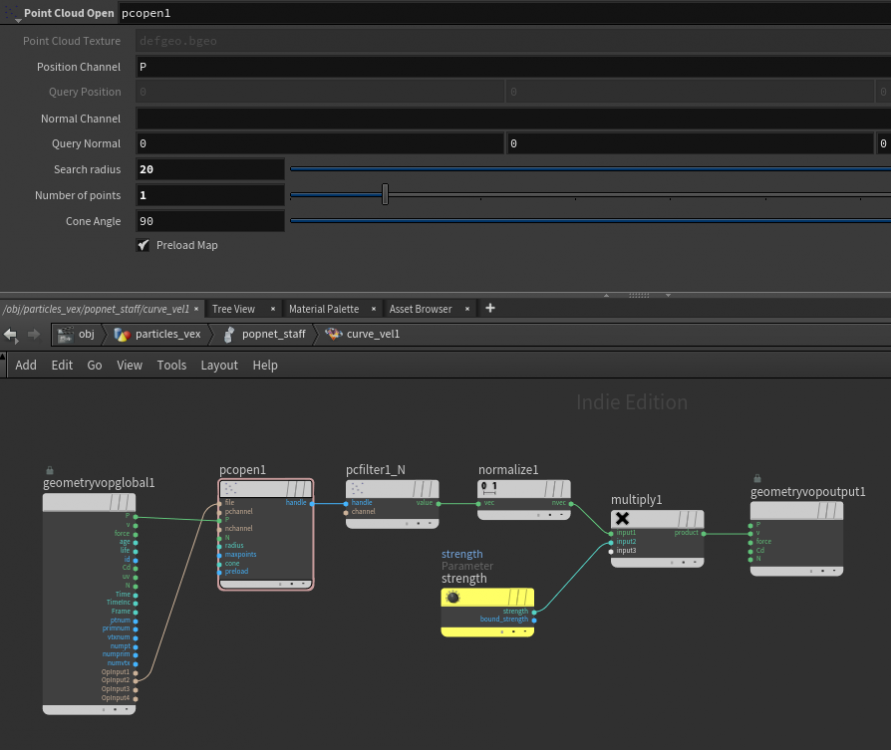
Attached are two screen grabs. One is a vops set up that works to convert @N to @v. The other screen grab is my failed attempt to recreate this with vex. what is wrong with the vex? Thanks!
-
Hello! I can't wrap my head around the "pcopen" function. SideFX Help states "This node opens a point cloud file and searches for points around a source position." Okay... but all the points already have a position vector attribute... otherwise they wouldn't exist... so what exactly is this node/function accomplishing? What is the source position... source of what? I'm looking at a volume vop network where this node is being used to fetch point attributes from a curve sop into a volume but I still don't quite grasp it... is that what pcopen does? sort of "map" point attributes into a volume? I would appreciate any clarification... thanks!
-
Hi everyone, trying to figure out how to randomise the number of iterations of a pc open in a vop node, based on a per point random the goal is to make variation in the speed of the propagation. I join a simple file, if somebody can help me it would be really apreciated Thx by advance Cheers basic-propa.hip
-
I'm learning Houdini. I'g trying to learn how to use pcopen specifically in vops. I'm very confused and am wondering if someone knows of a clear and concise tutorial of how to use pcopen in general. Preferably something other than Peter Quint's tutorials on the subject that are 7 years old and move very slowly. much appreciated.
-
Hey guys quick question, I need to do some operations on two particle streams\groups using point cloud using a pop vop. fist of all, can I put the pop vop after merging the two streams, or do I need to have it connected to one of the groups before the merge, and how to plugin the two in the pointcloud open? Note:I'm really new to pointcloud, but I've been using TP witch has the same method of groups and searching between the groups! Thanks, Mook
-
 I posted here (http://forums.odforce.net/topic/20626-flipping-animation/) yesterday but haven't yet received any replies so I will ask a more basic question that should help me solve the problem in my other post. If I have a grid of black points and I colour some of them red, how can I find the nearest red point for the other (black) points. I'm fairly sure it would be: - pcopen - pciterate - if red is > 0.1 But then how would I break out of the pciterate and use that found point, e.g. to get the distance between the found red point and the current black point? Cheers, Mike
I posted here (http://forums.odforce.net/topic/20626-flipping-animation/) yesterday but haven't yet received any replies so I will ask a more basic question that should help me solve the problem in my other post. If I have a grid of black points and I colour some of them red, how can I find the nearest red point for the other (black) points. I'm fairly sure it would be: - pcopen - pciterate - if red is > 0.1 But then how would I break out of the pciterate and use that found point, e.g. to get the distance between the found red point and the current black point? Cheers, Mike -
I am struggling a bit trying to get this simple thing working (I am on H13): I want to examine the 3 closest points surrounding each point in a point cloud, and simply print some debug message. This is the code I use in an Attrib Wrangle sop node: int handle=pcopen(@OpInput2,"P",@P,10,3); printf("ptnum %d\n",@ptnum); int iteration=0; while (pciterate(handle)) { iteration++; printf("iteration %d\n",iteration); } pcclose(handle); I have 10 points scattered and I use them as input 1 and 2 for the Attrib Wrangle node. So I am trying to loop through the points in the input 1, and for each one of them open a pc based on the input 2. I expect a feed back like this : ptnum 0 iteration 1 iteration 2 iteration 3 ptnum 1 iteration 1 iteration 2 iteration 3 ... ptnum 9 iteration 1 iteration 2 iteration 3 But I receive this feedback instead: ptnum 0 ptnum 1 ptnum 2 ptnum 3 ptnum 4 ptnum 5 ptnum 6 ptnum 7 ptnum 8 ptnum 9 iteration 1 iteration 2 iteration 3 I must clearly be doing something conceptually wrong. I thought that the content of a Attrib Wrangle node set to "point" was looping through all the points in the first input. So the code should be executed on all the points , is that correct ? (scene file included) pciterate_test.hipnc

.png.a6aee2d716ff1c8c16bc4d4ab13433b0.png)
.png.bd634420b4803c4830eb8d22b9cc40df.png)