Search the Community
Showing results for tags 'pointcloud'.
Found 12 results
-
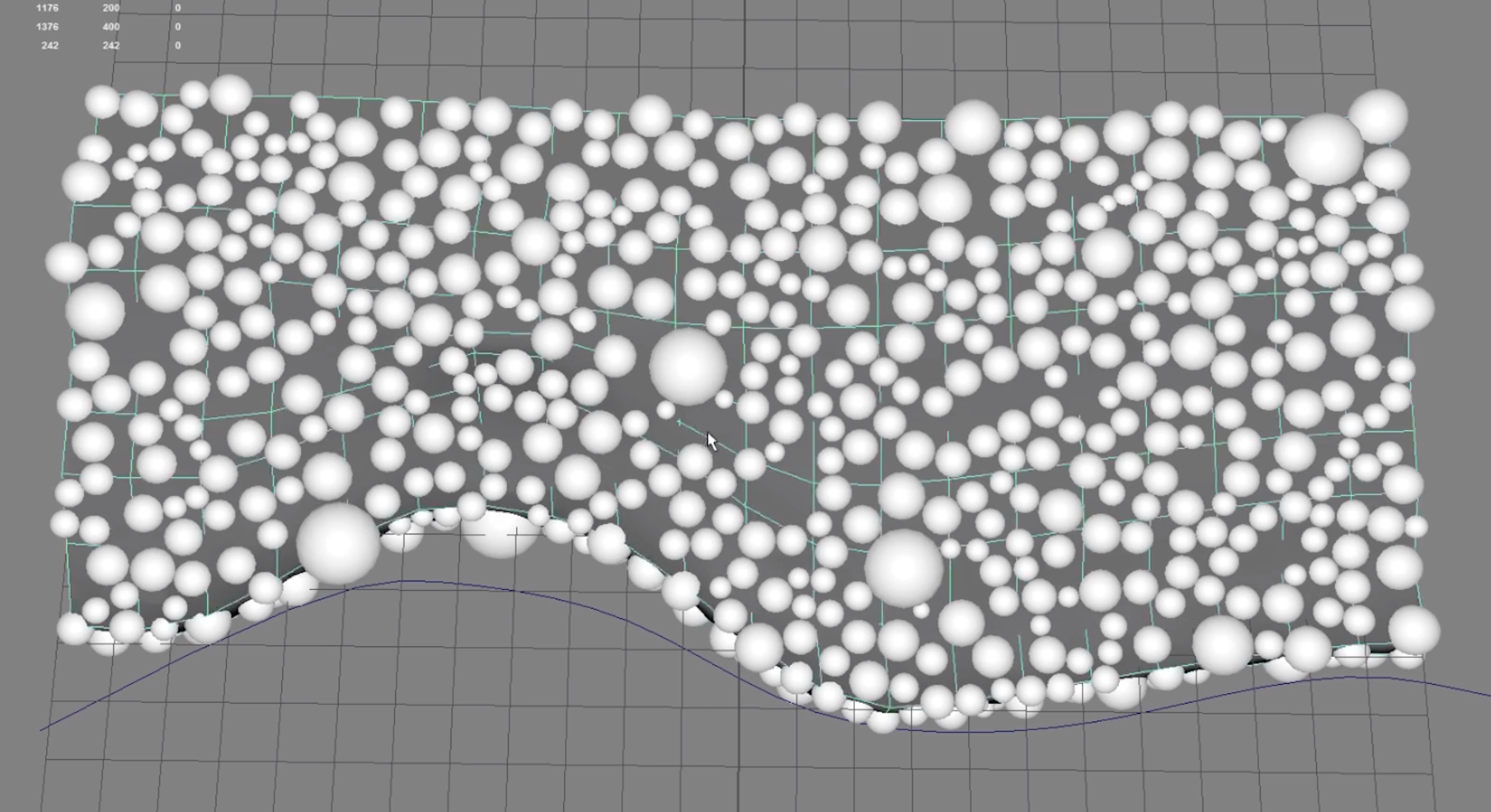
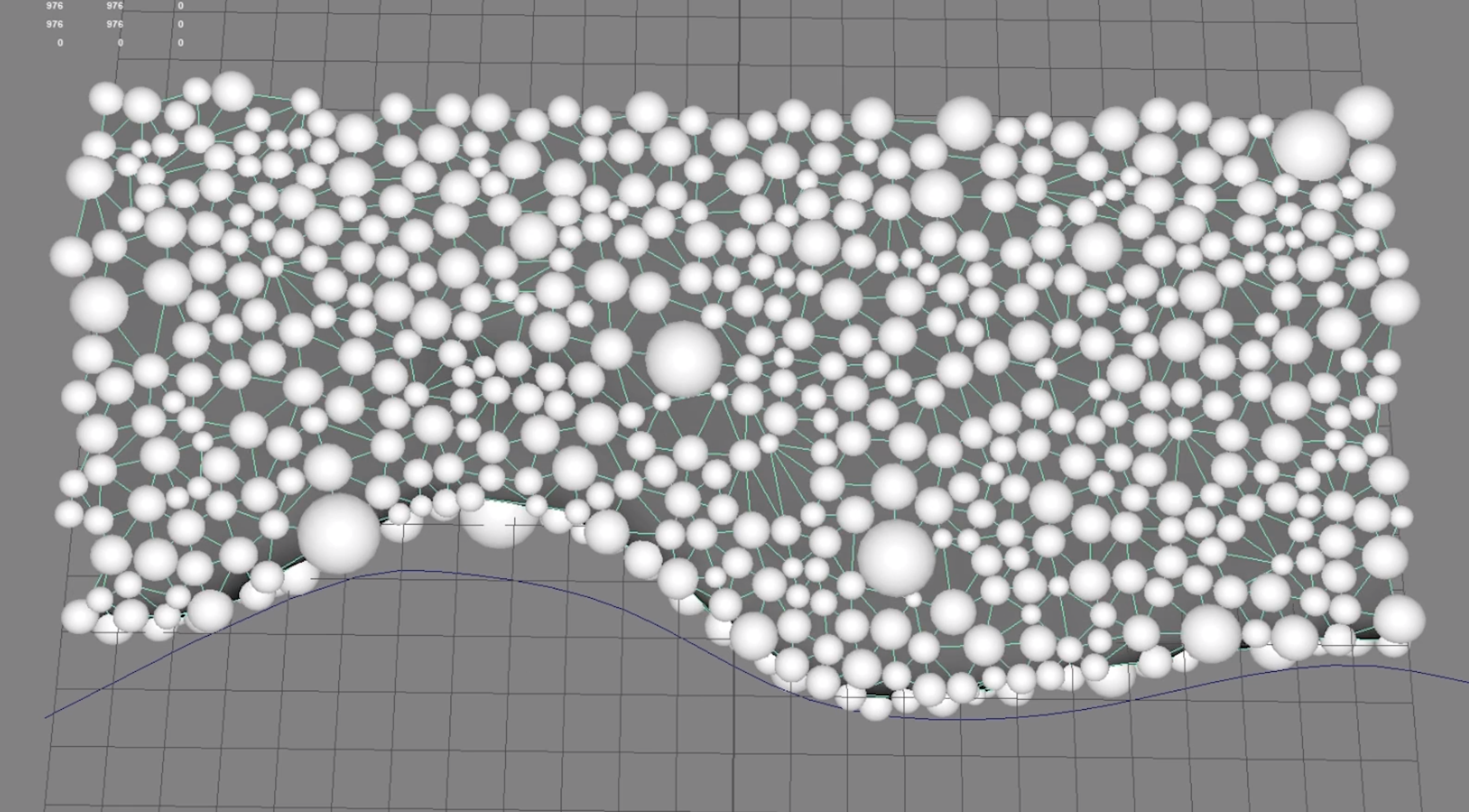
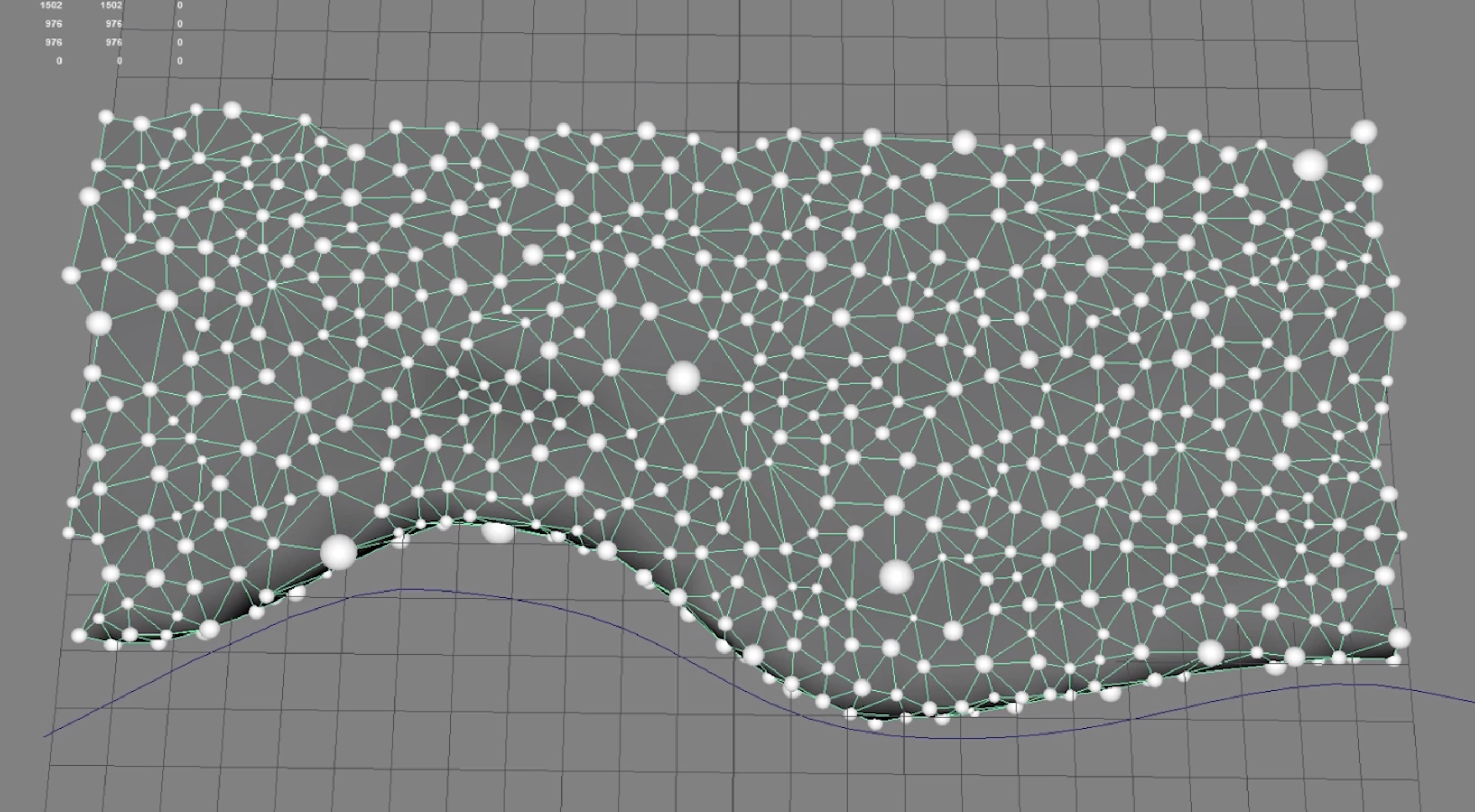
Hey everyone, I'd like to share a small package I made with you, called Geometry Sequence Player. It allows you to bring mesh and pointcloud / particle animations from Houdini to Unity! Here as an example, I created a small surfing game prototype in Unity, with a wave animation imported from Houdini: The animations have to be exported as a (textured) mesh or pointcloud sequence, where each frame is stored in a seperate file. After a short conversion with an integrated tool, they can then be played back inside Unity. The package features Editor player controls, Unity timeline integration, a full C# scripting API and runs on almost any platform, including all Desktop systems, Android, iOS and XR. But that's what VATs are for! Indeed, the package mostly covers the same functionality as Vertex Animation Textures However, I found VATs to be quite involved and finicky at certain times. So the approach of this package is simple & stupid, but in return pretty robust and with quicker iteration times. And it even runs with Houdini apprentice! The only drawback is that the sequences are quite large, so for a game where small installation sizes are crucial, this approach is probably not suitable. Download it here: Available open-source and free for non-commerical applications For commercial use, or to support development, get a copy on the Unity Asset Store If you've used the package in your pipeline, I'm super interested in hearing about your experiences, and also any suggestion for improvements or features that you might want to see!
-
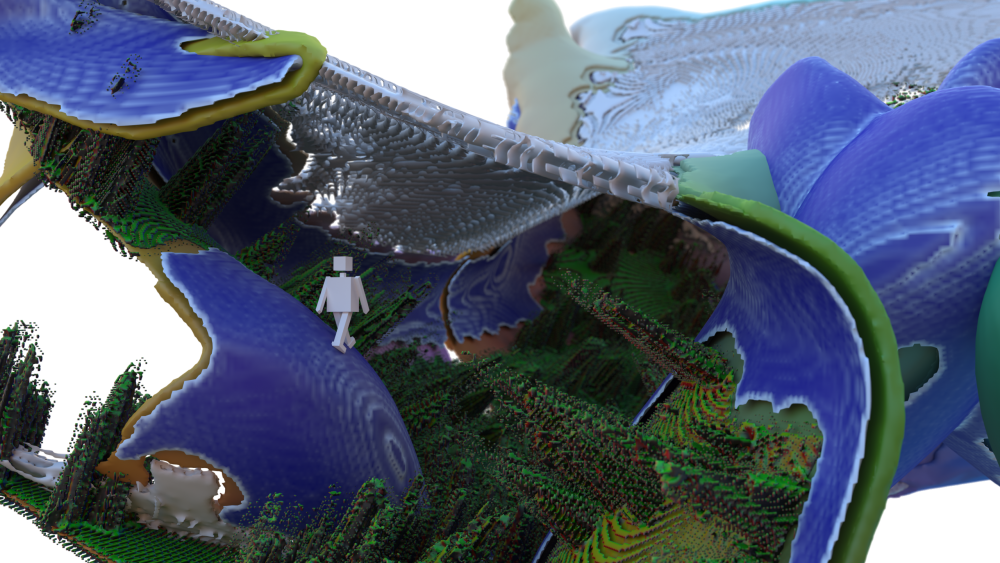
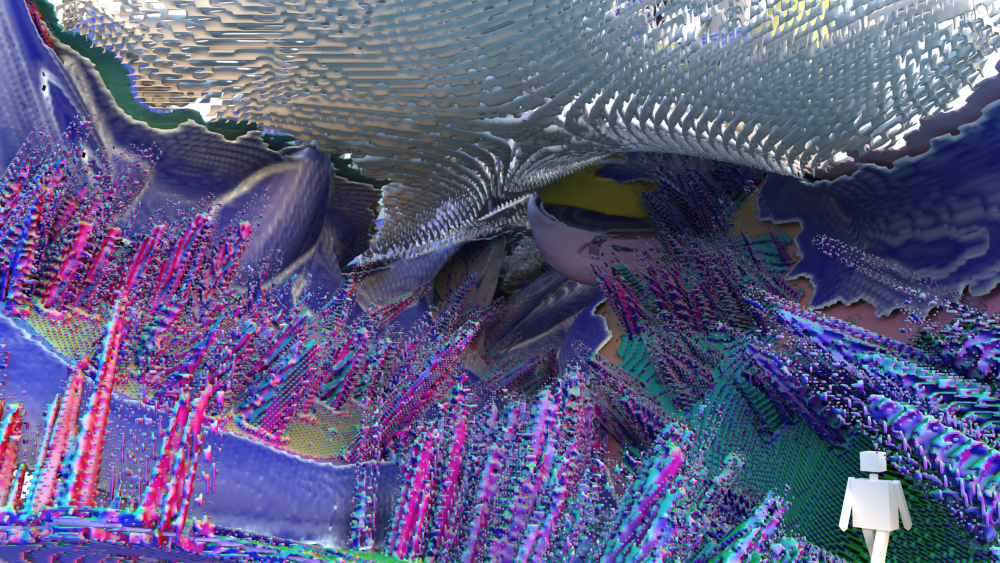
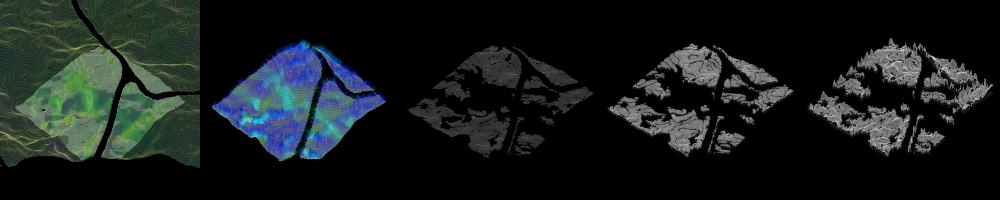
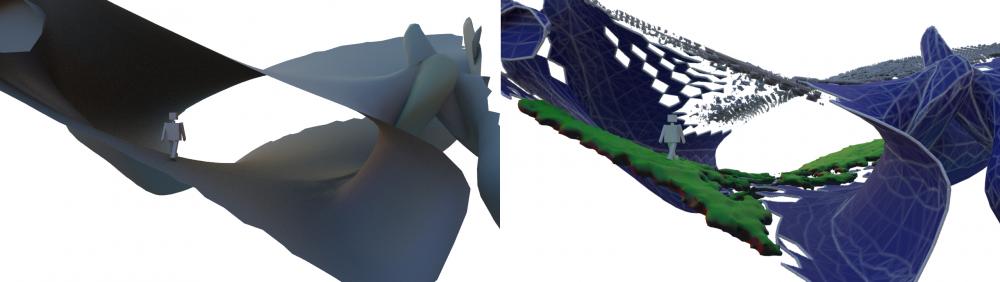
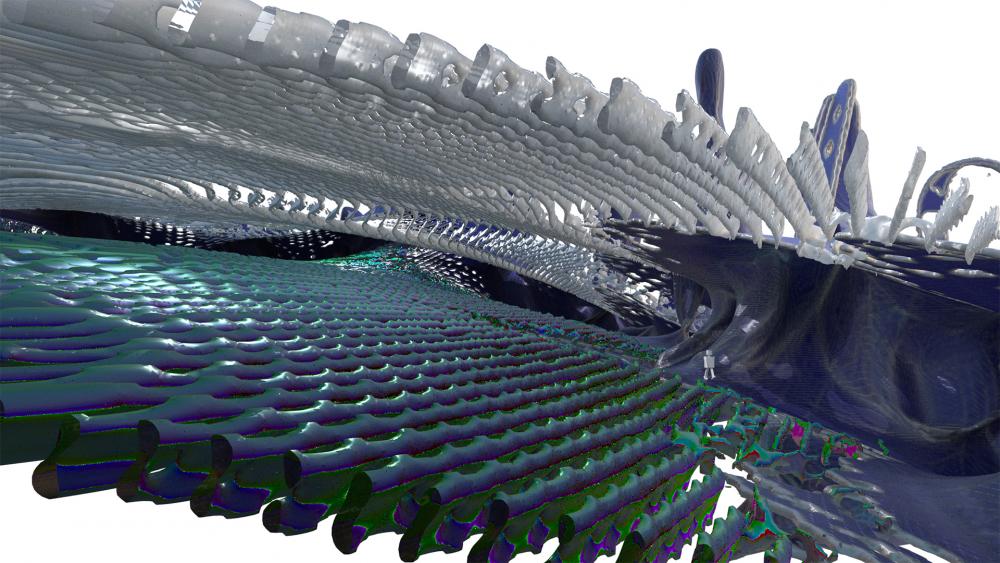
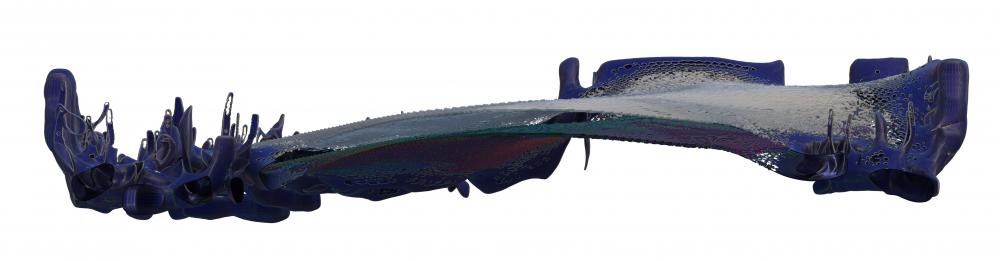
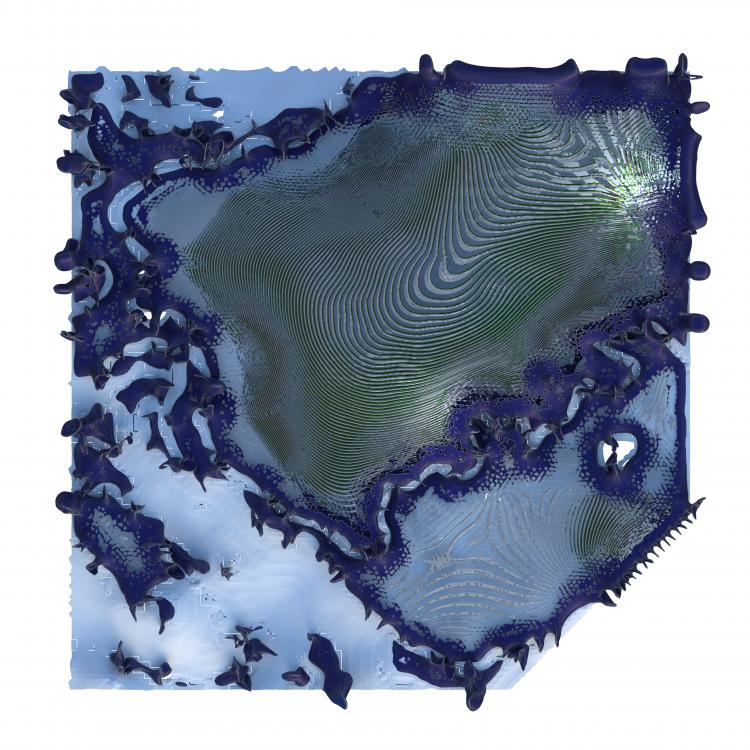
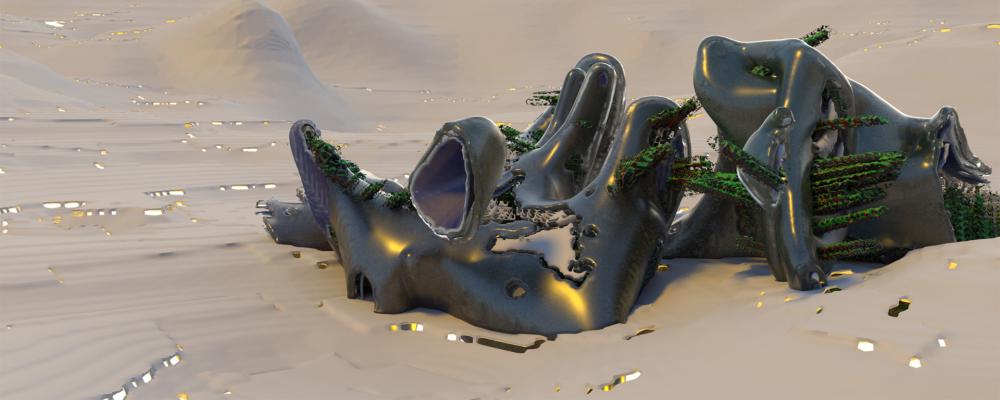
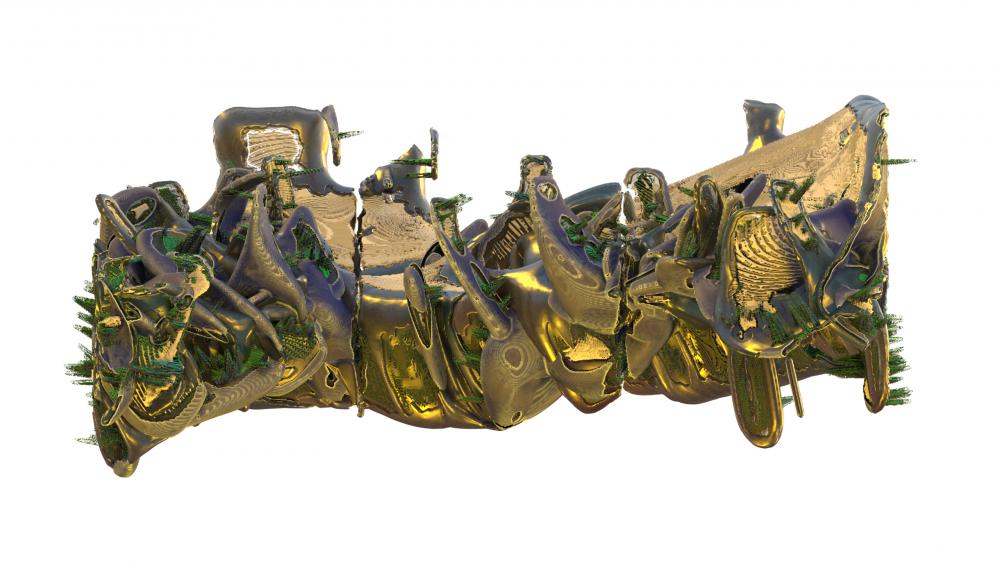
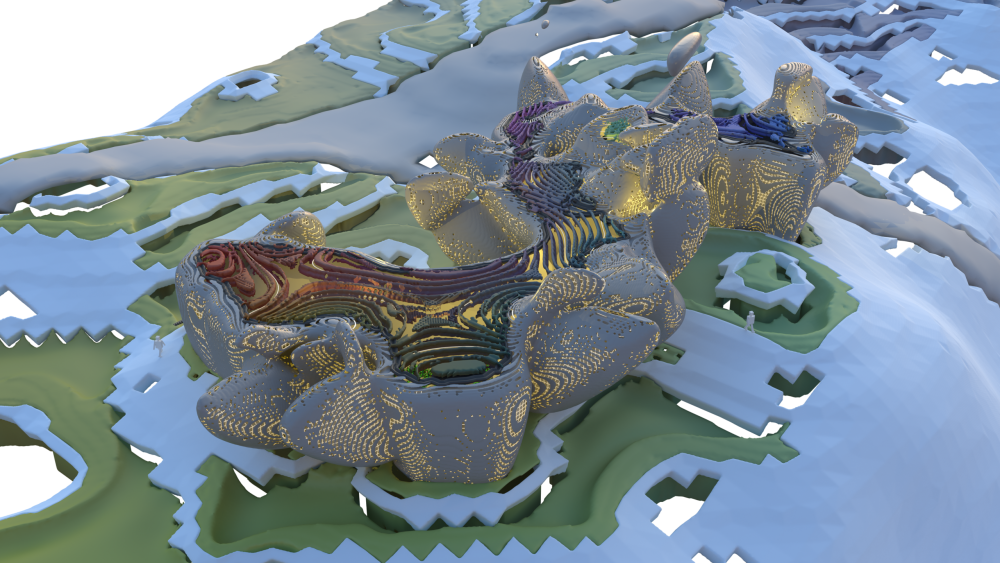
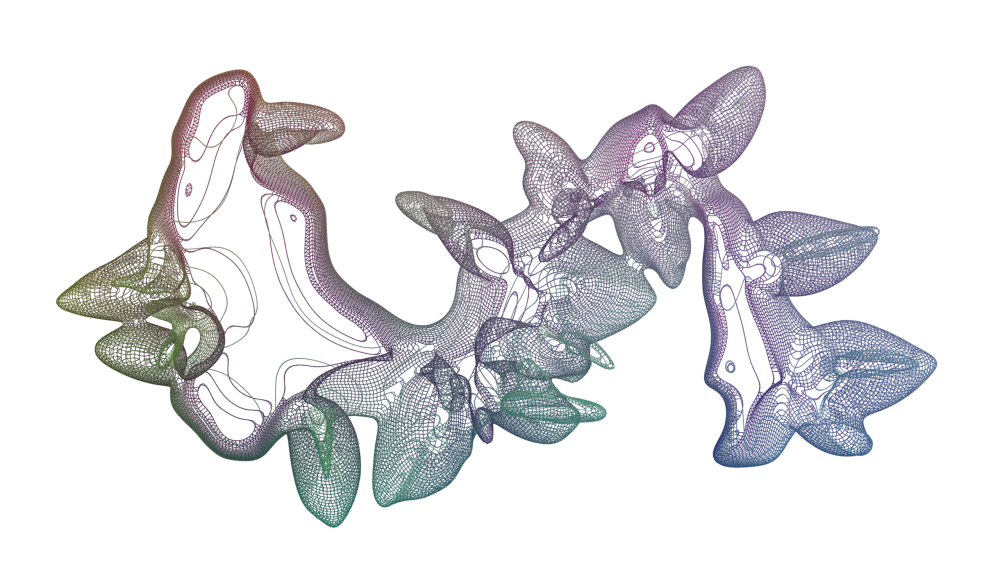
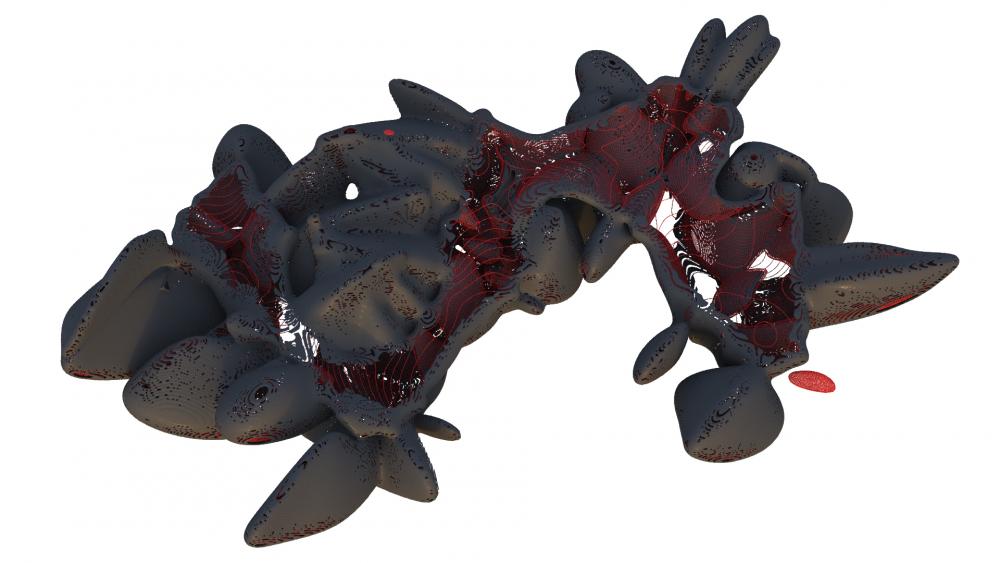
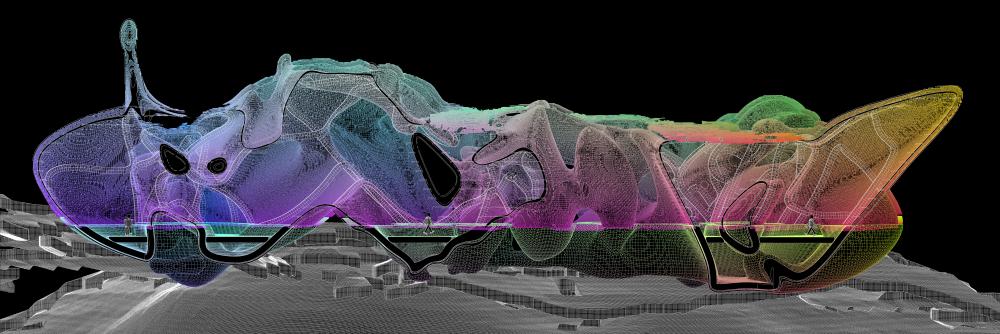
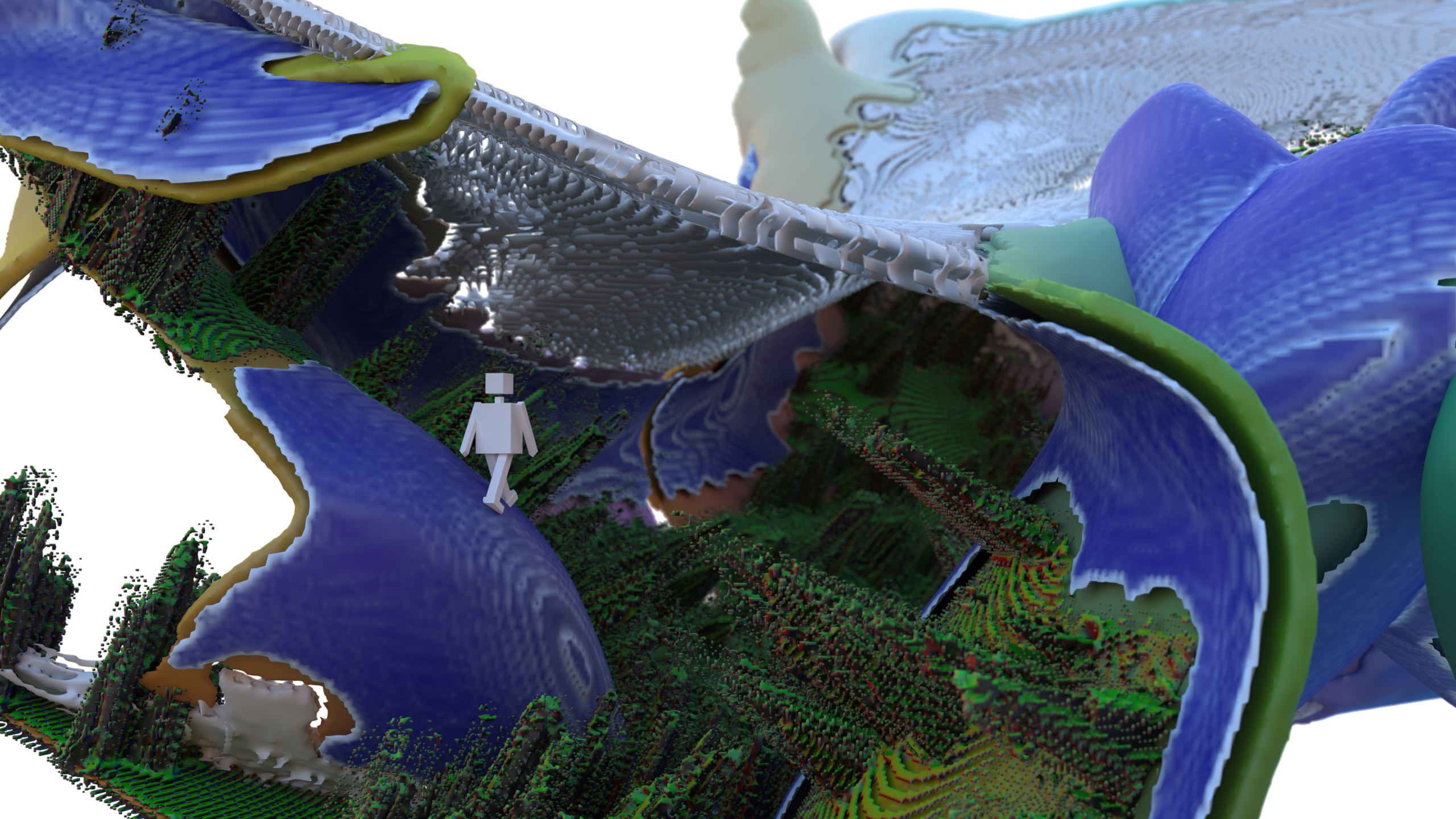
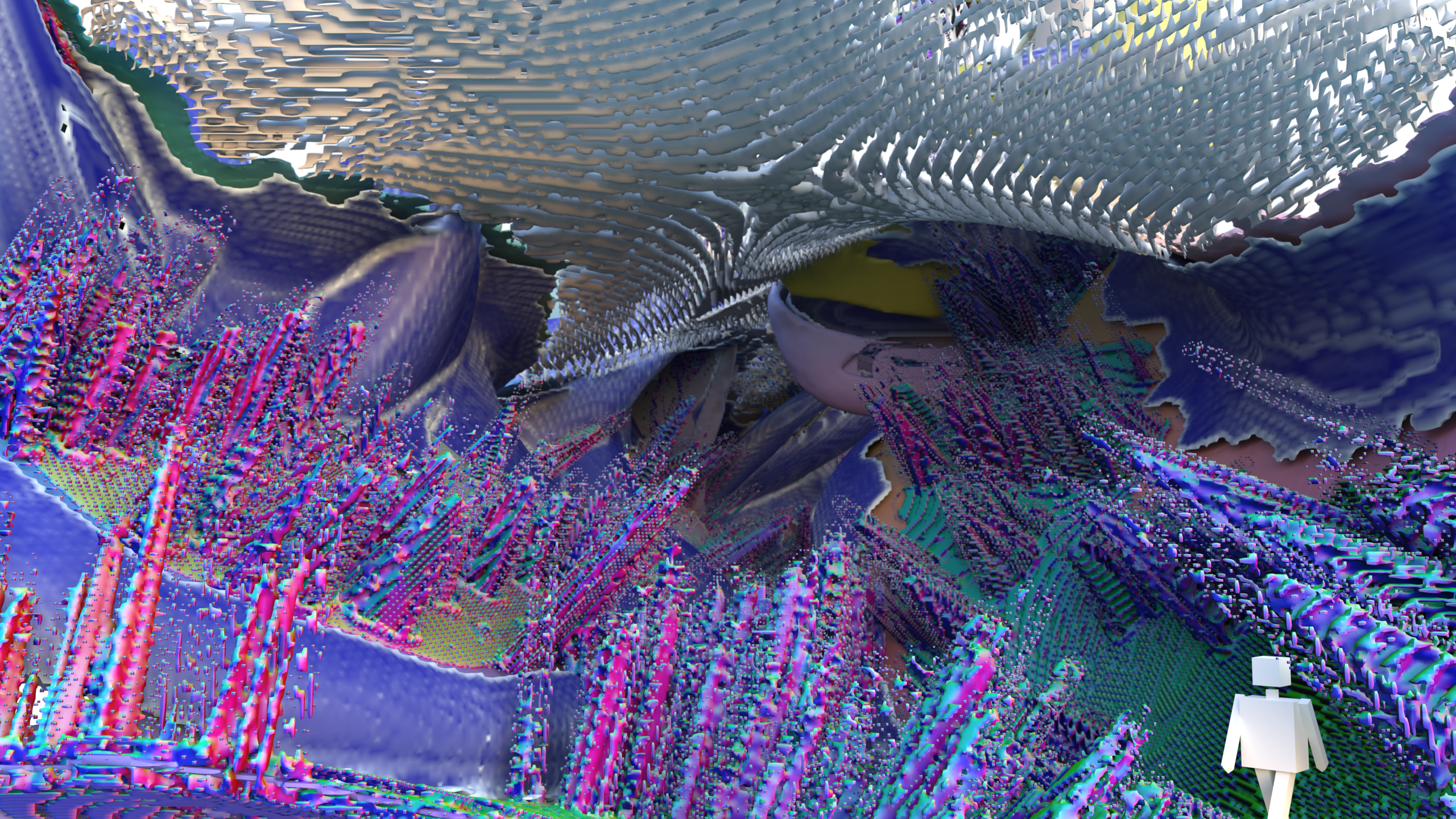
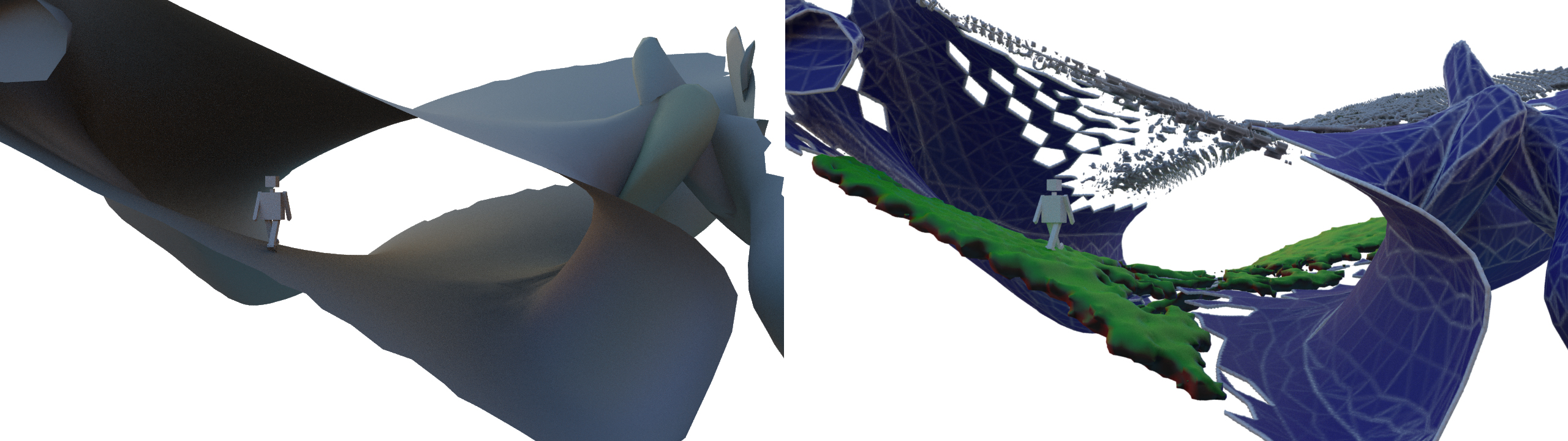
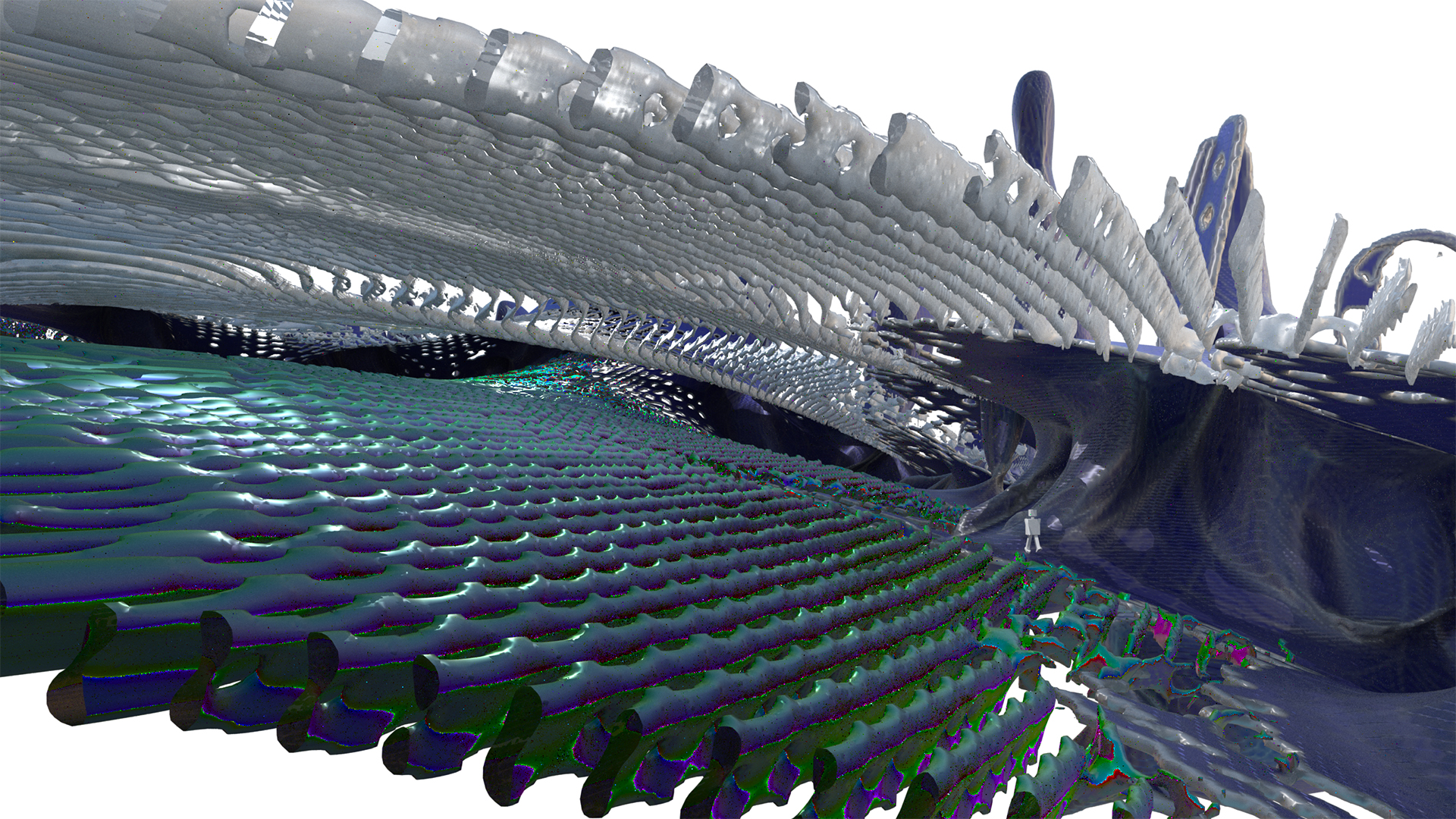
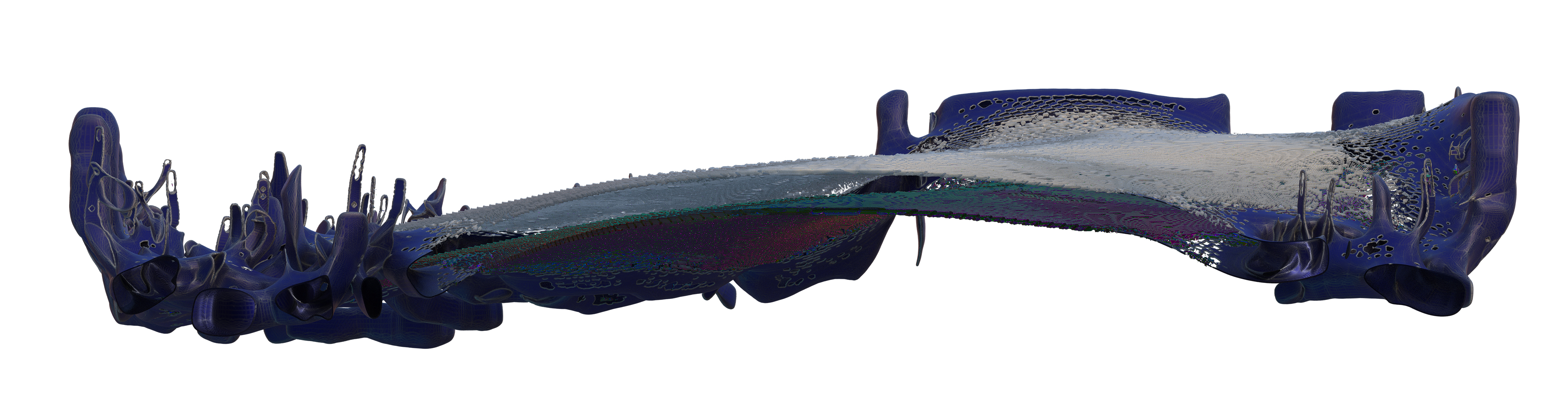
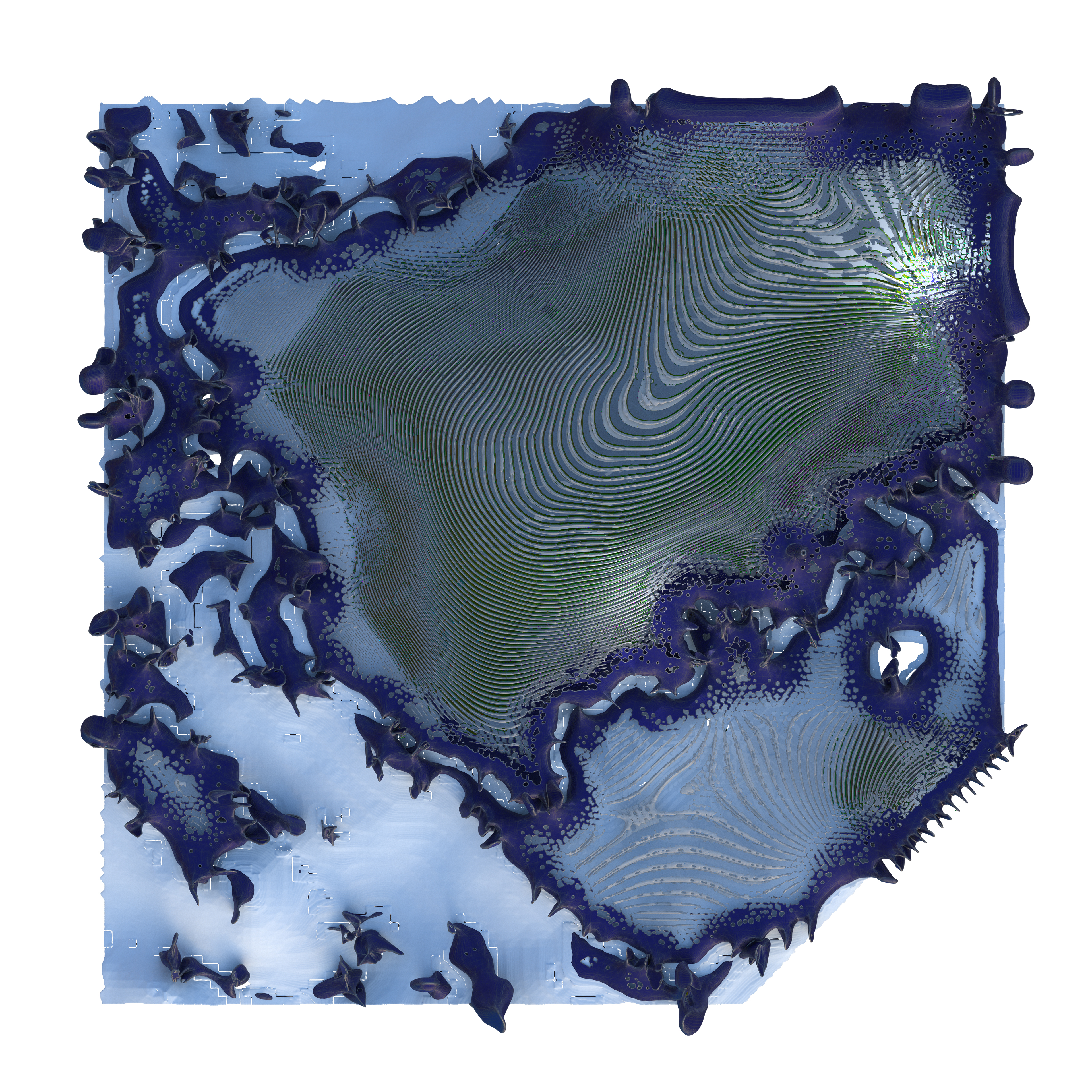
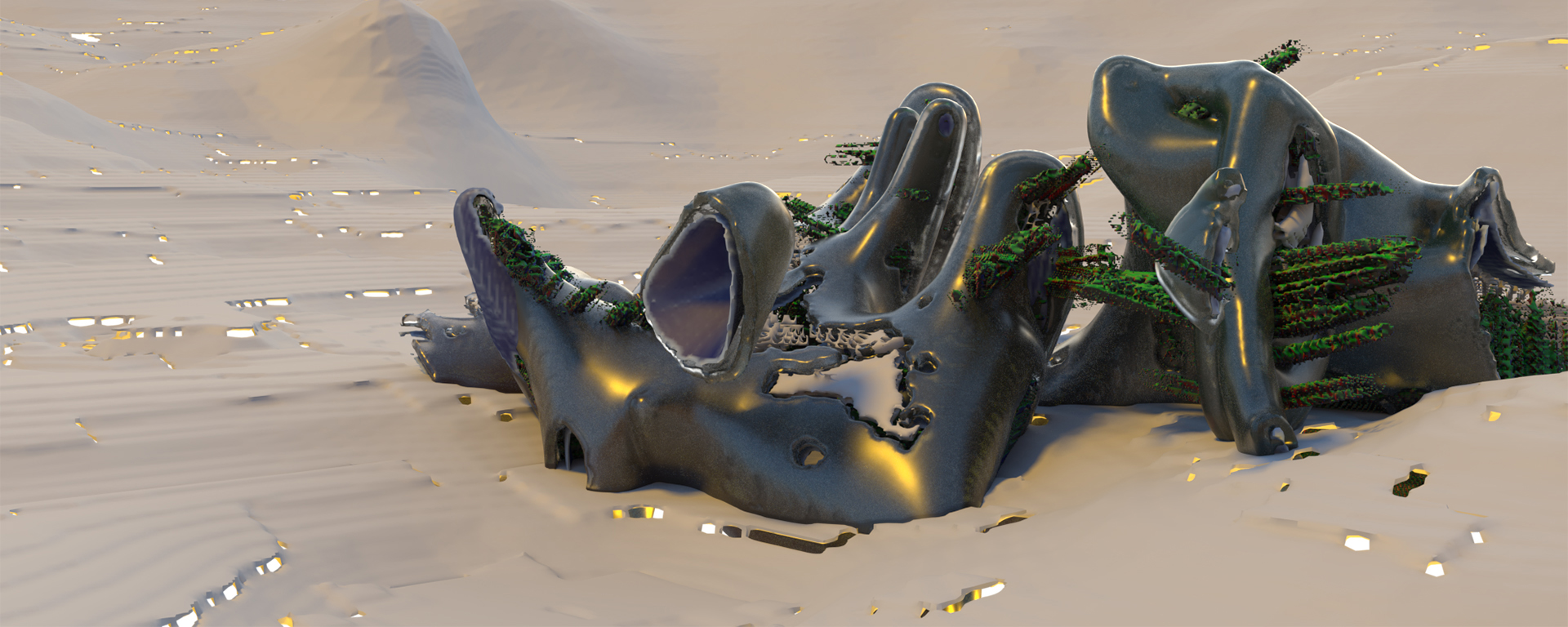
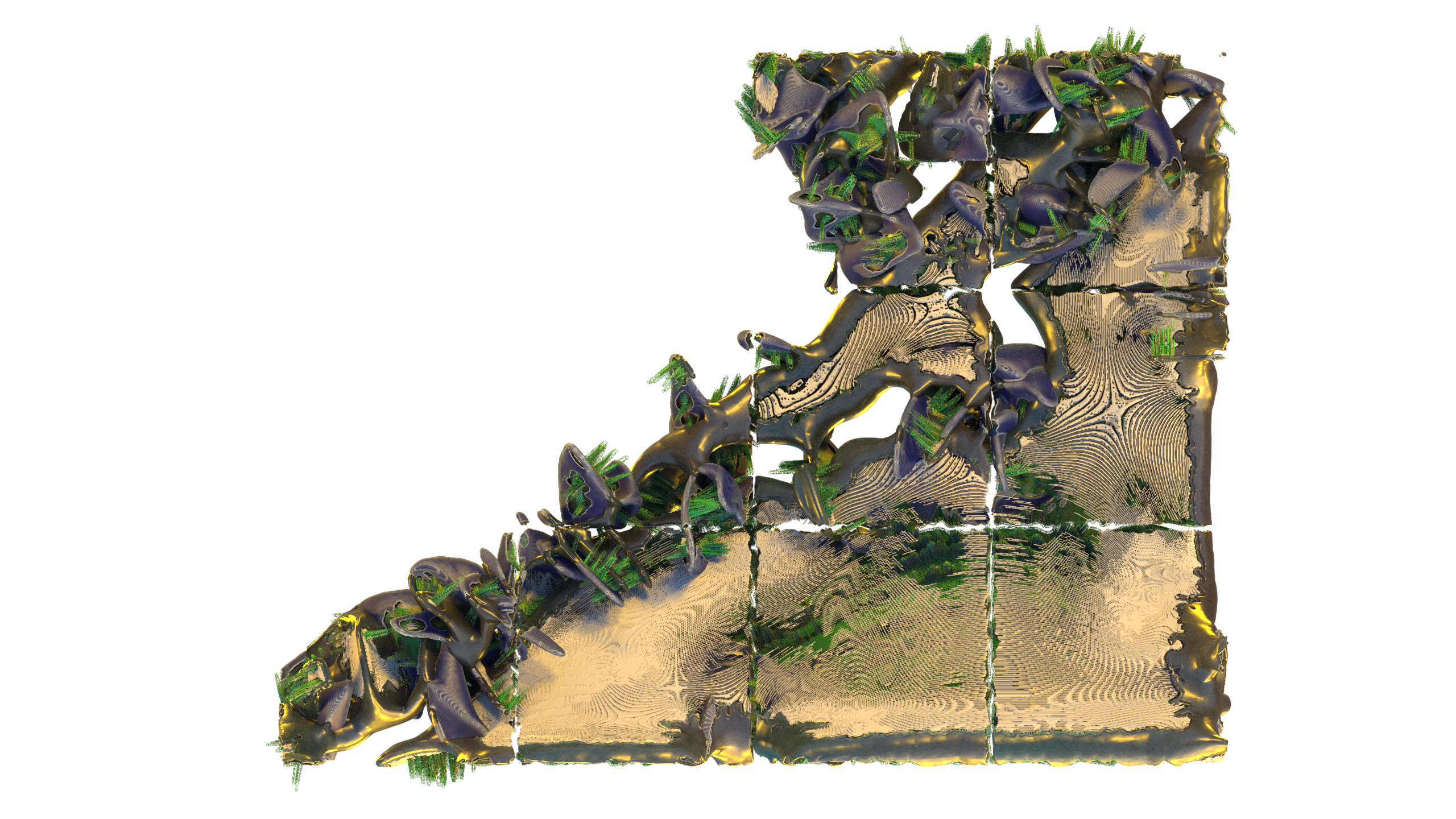
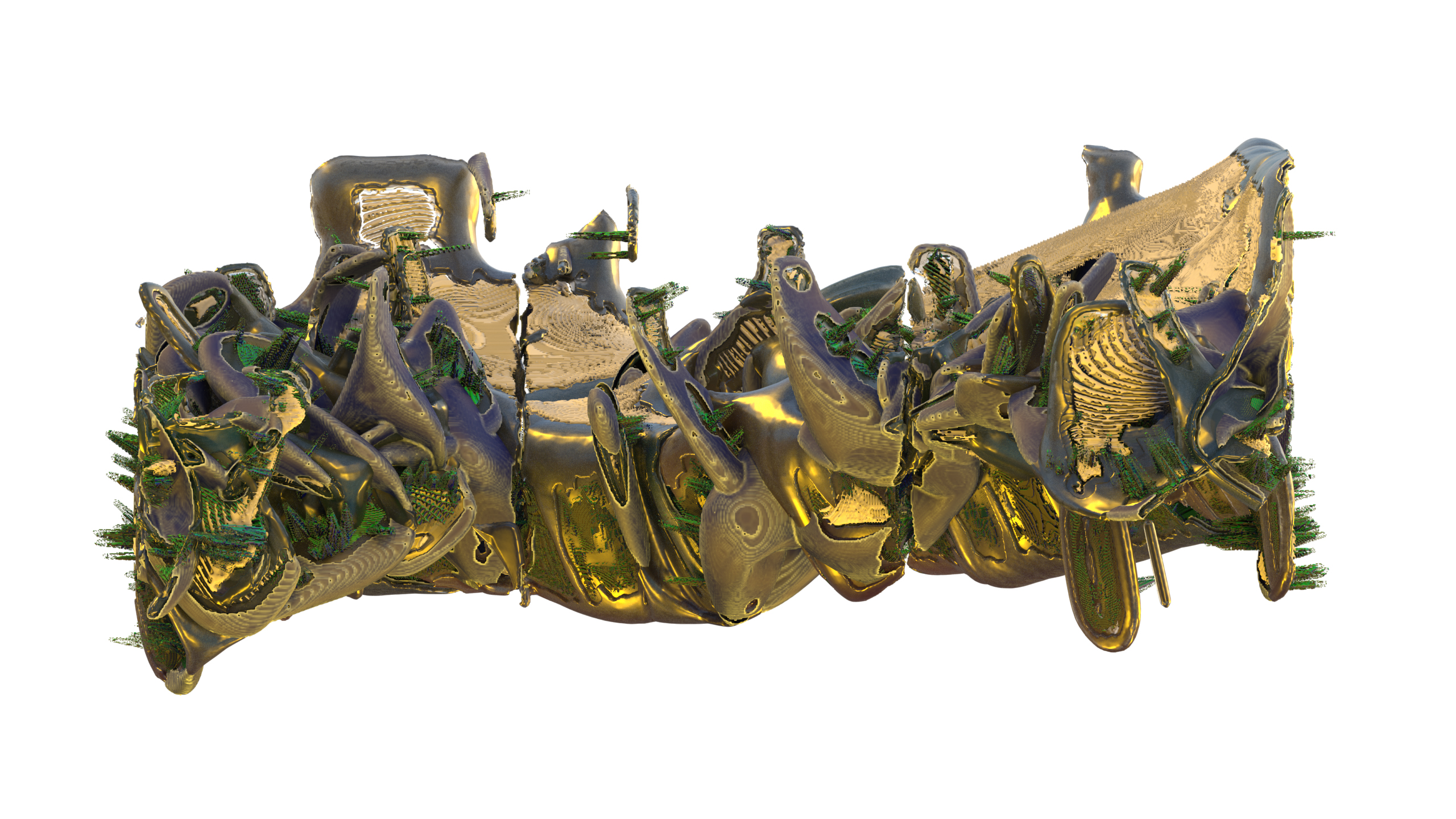
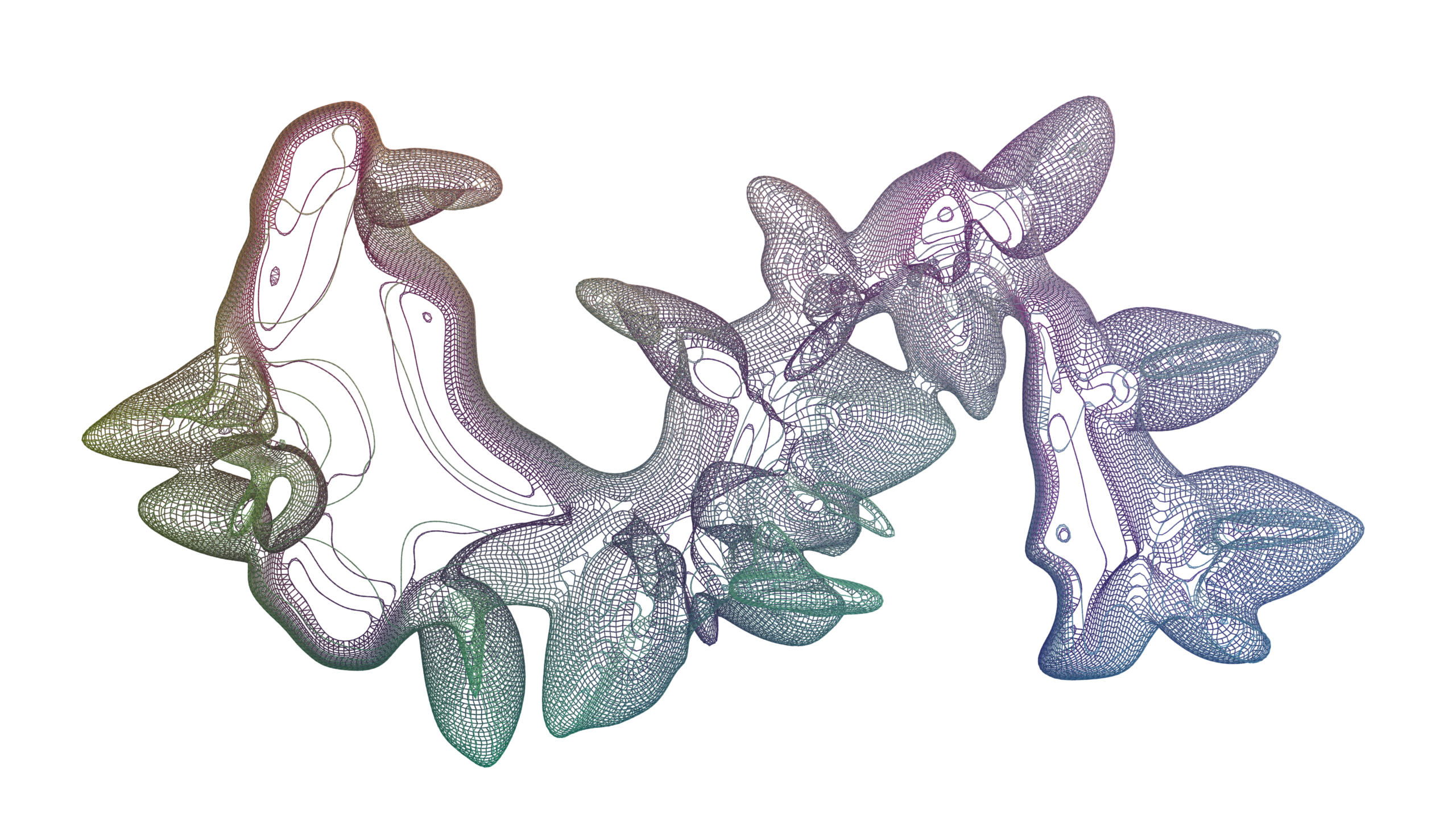
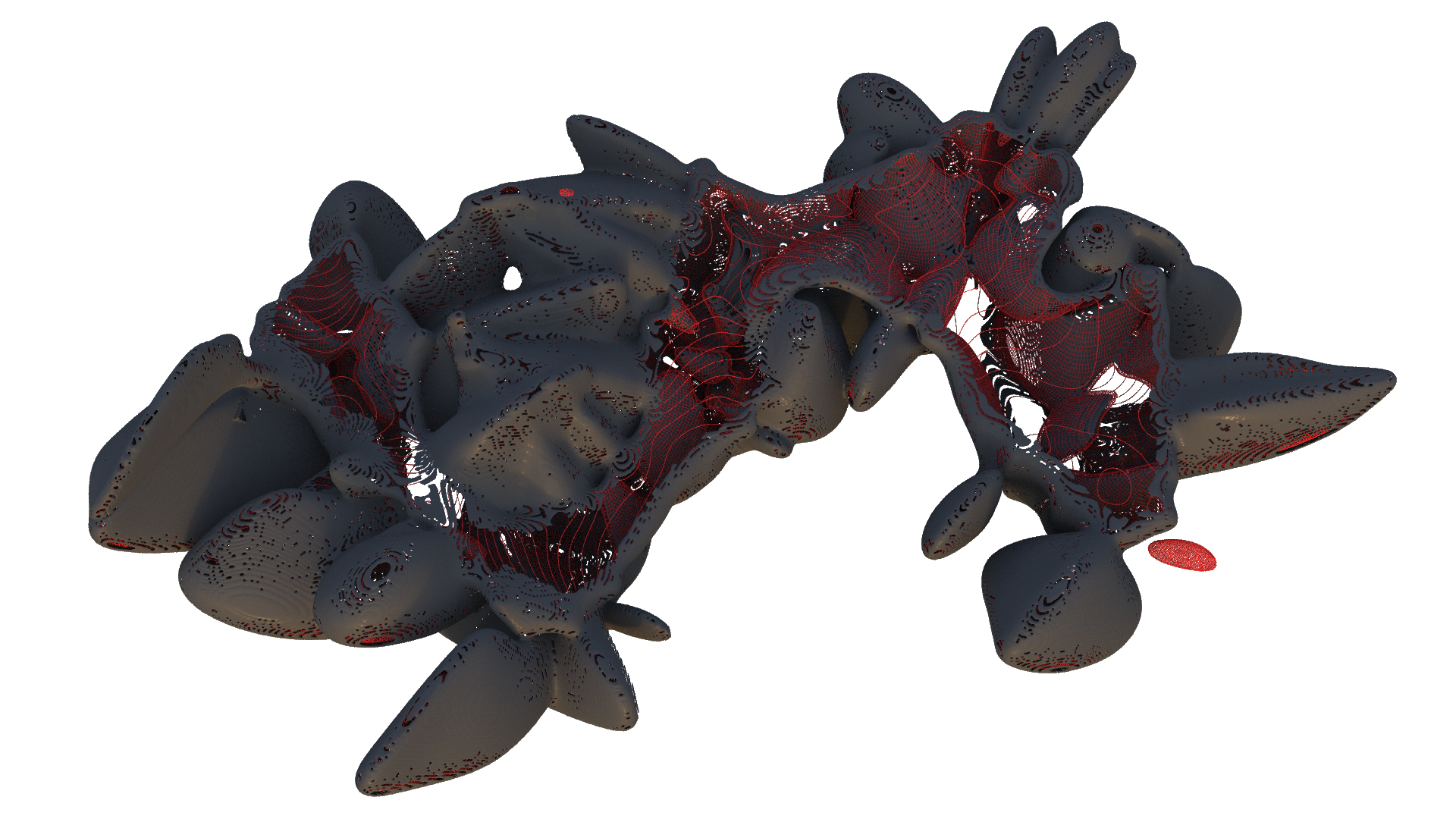
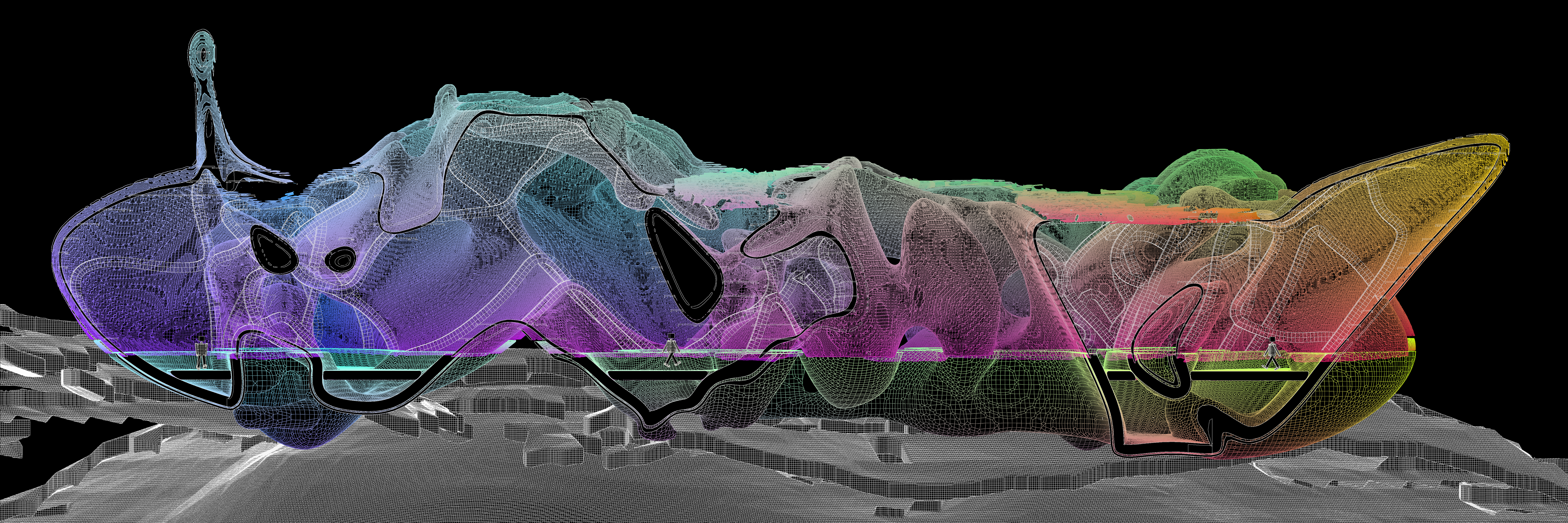
I originally made a post in in the WIP section, but have finalised a selection of images that demonstrate the extent of the project at this particular time. Hope to get some tips, speculation and direction . The work started with an idea of looking into systems of growth and the procedural simulation of that growth. The question of landscape surveillance and 'fertility' arose - can a landscape (or object) topology be evaluated for growth? In this case the landscape would be a scanned model of a terrain, converted from pointcloud to mesh data and thus reinterpreted as a topology of points and primitives with certain inherent attributes: Position (vector), Normals (vector), and curvature (scalar) predominantly. The simulation can then search for 'flatness' and eliminate areas of surface beyond a limit of acceptability. The surface is then displaced whilst maintaining ties to the remainder, this seemed to mirror a process not too dissimilar to inflation (although much more noisy and undefined), always using the retopologised mesh (and thus recalculated attributes) as a driver for the next frame of growth. Generated or grown form is evaluated through a series of spatial explorations with particular functional characteristics in mind. Much like a single-surface-landscape produces the massing for proposed architectural volumes, these volumes are then reinterpreted as single-surface forms that morph into a typology of architecture defined by certain rules. The primary purpose of the interior volume is to house the program of an architecture. The height of the form is predetermined in the procedural algorithm of massing to produce volumes within a range of heights (for example between 3 and 20 meters). The nature of the form suggests an architectural language of evaluated skin as a means of facilitating architectural space. This is then differentiated to provide for the various requirements of a space of production - for example: how can the floor surface serve as a platform for plant growth; how can the side envelope serve as a mediator of thermal comfort; etc? A. There is a desired differentiation between roof and side envelope - key factors to be considered are the issues of transparency in form for light to enter the space below and the capacity to drain rainwater or melting snow. B. An impression of uniformly distributed structural frames is suggested as a method of holding up a dressing of skin not too dissimilar to ideas of bone to muscle tissue connections. C. The form is interpreted as a skin multi-functional, multi-material character. There is a desire for a thermal envelope mixed with porous characteristics that allow for breathability within the interior environment, light, and mediation from the harsh external environment. The following images are all excerpts of a fully procedural exercise; all grown; but in various stages of development of the same system.

- 3 replies
-
- 1
-

-
- simulation
- growth
- (and 12 more)
-
 PC.hip as you can see in the images below when I connect the position of the second input pc doesn't work correctly , what did I do wrong? and what's the warning in the last image? PC.hip
PC.hip as you can see in the images below when I connect the position of the second input pc doesn't work correctly , what did I do wrong? and what's the warning in the last image? PC.hip.thumb.png.c10729fa8d301d977df046f0ce74b735.png)
.thumb.png.89d4b2158398d80ece02bb1089071686.png)
.thumb.png.387b3846fb0e2a88ee804e65e0d1c179.png)
-
what's the difference between pc find and pc find radius in action ?
-
Hey guys , I need a good resource to learn point cloud in vops with basic examples , Plz help me Best regards.
-
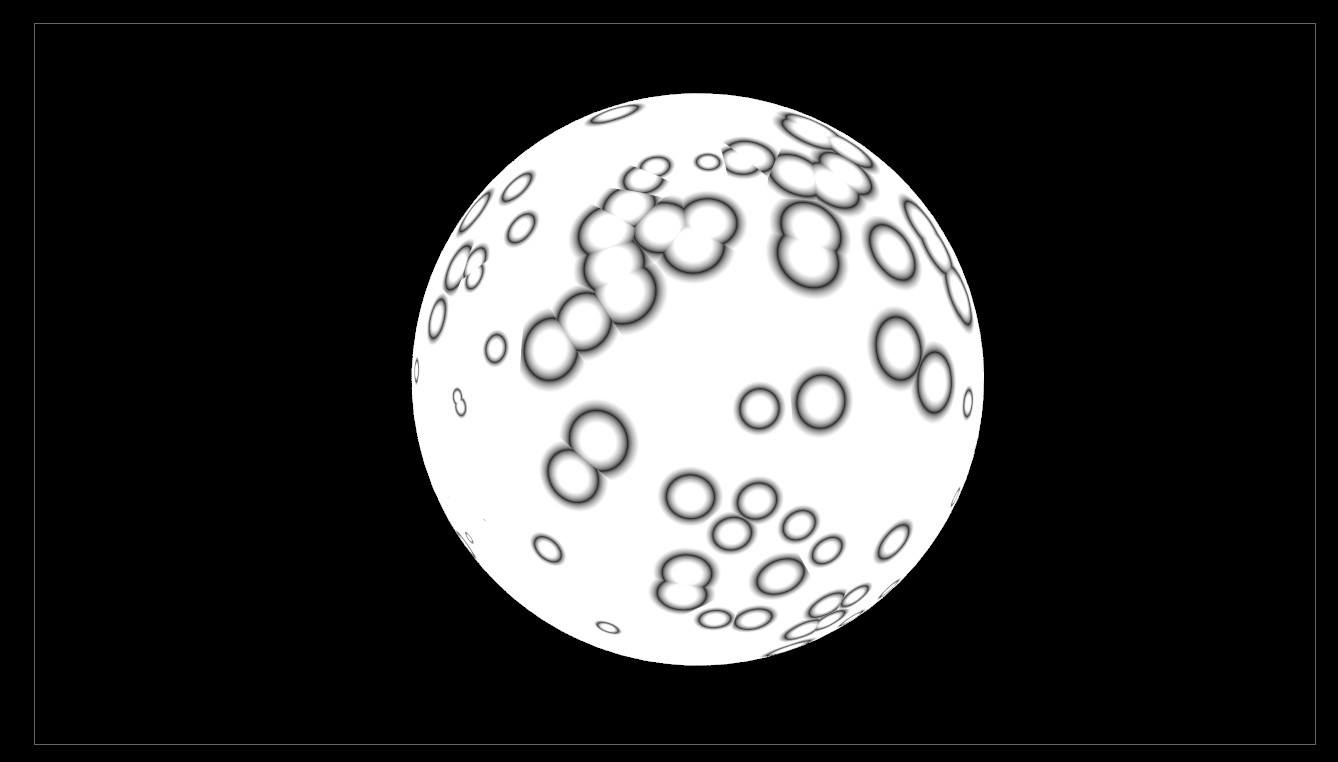
 I'm trying to create rings in mantra that are larger where my scattered points are brighter. I've got a setup that works for that, but what I'm looking for iis for the rings on top of each other and overlap one another. I figure I need to loop over my point cloud one point at a time and then multiply the result on top of each other maybe. I can't seem to figure out how to get a loop that does what I want. I tried to follow the documentation for the point cloud nodes, and it even mentions that a few of them are useful in a loop situation but it's just not working correctly. Is what I'm trying to do even possible. I don't have a lot of experience with mantra. mantra_pc_lookup.hip
I'm trying to create rings in mantra that are larger where my scattered points are brighter. I've got a setup that works for that, but what I'm looking for iis for the rings on top of each other and overlap one another. I figure I need to loop over my point cloud one point at a time and then multiply the result on top of each other maybe. I can't seem to figure out how to get a loop that does what I want. I tried to follow the documentation for the point cloud nodes, and it even mentions that a few of them are useful in a loop situation but it's just not working correctly. Is what I'm trying to do even possible. I don't have a lot of experience with mantra. mantra_pc_lookup.hip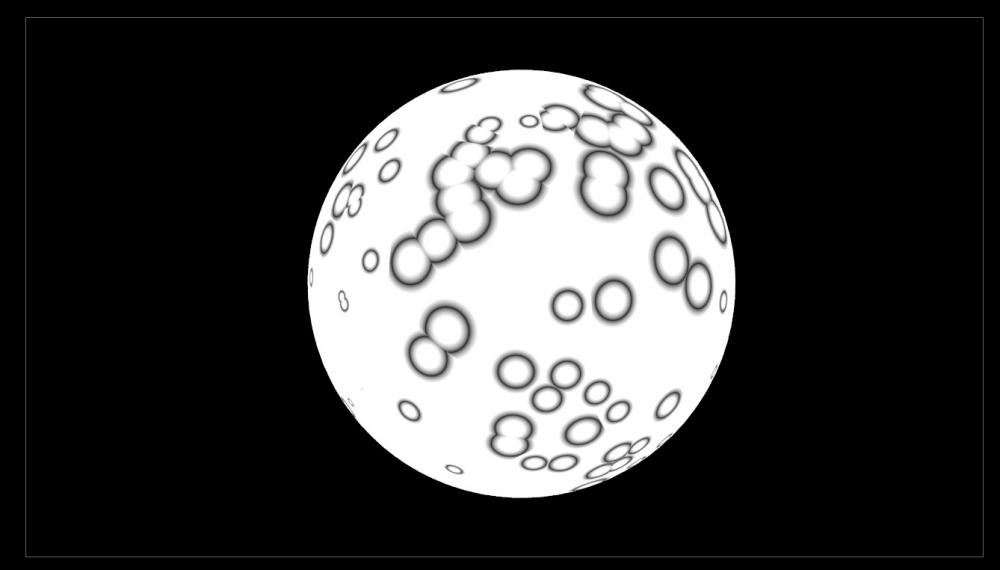
-
Hi, im trying to create a reptile scale tecnique, using points scattered along curves on a mesh where i'd like the scales, and i came across this amazing work by psop creating a chameleon.(https://cghow.com/making-of-jbl-chameleon/) Does anyone know how you can go from the first mesh which is the classic quad meshed character, to a remeshed version based on connecting all the scattered points on the mesh? i've tried everything i can think of... 1.triangulate2d, then restoring positions, but its not good for complex mesh shapes. 2.tetrahedralize, not so hot as cant tell it to only grab points from the surface of the mesh, it goes mad connecting innards of the mesh like a lattice. 3. i then tried "point iso cloud" which is great for laser scan reconstruction, and uses my custom scatter points to make the mesh BUT does not result in a mesh that uses my scatter points as the actual mesh points. 4. is there any mileage going down the vex route, creating a UV, then instead of searching for nearpoints in 3d space (where you could grab near points that arent actually connected on the same part of the surface of the character), and instead search distance on the UV positions of the points? 5.voronoi fracture the mesh using needed scale position points(scatter), then trying "compute dual" on the divide SOP. this feels quite close, i just need the mesh thats constructed by connecting the scatter points making lots of triangles; once ive got a mesh with the points of the connected triangles at the centre of my desired scale positions i can then compute the dual and HURRAH! ive been smashing my head against a wall for days now, id really appreciate some brain power as i think ive burnt all mine out!! cheers J Atomic14
-
Hi everyone. I am trying to "copy" images onto my imported point positions in cops. In the example file, you will see that I have successfully imported my point position into cops, but I am not sure how I can go about placing an image (the center of that image) on a point coordinate? obviously I would want to control the size of that image once placed but I can cross that bridge when I get there. Thanks in advance. texture_placement_odforce.hip
- 2 replies
-
- 1
-
-
- pointcloud
- texture
- (and 1 more)
-
Hey Trying to randomise falloff on an attribute transfer, as I understand it only evaluates once so can't read a point expression from source points. Trying it in a forloop but not having much luck if someone could take a look at the scene? Also tried setting up in a vop with pointclouds and this works ok, but how do I get the smoothness of the falloff in this? Ta PC_falloff.hip
-
Hi, I'm searching for a way to create a pointcloud from rendered geometry. More or less it was possible with prman where I was able to save point positions with rendered color information during rendering (or in a pre render pass). Same procedure worked in more ore less in mentalray. Can I do it in mantra as well? The result should be a camera independent point clouds with rgb and position data.
-
 Hi, I know point clouds can be used to blend/average attributes within the radius of each point. Is there a way to do the same where it only does this if: 1. A point is connected to the same surface as the current point. and 2. A point is within X units distance on the surface from the current point. Not point to point straight line distance, but the shortest surface distance between 2 points on the surface. I am not sure if there is a proper name for this. Not the best pic but something that looks like this: As you can see the length of the shortest path that lie on the surface. The surface can be polygons or NURBS. This can't be faked with neighbour functions as edges are too coarse. Can this be done using point clouds? If not, VEX? If not, then any other solutions in Houdini? It's gonna be a per point operation though just like VEX/VOPs. Thanks
Hi, I know point clouds can be used to blend/average attributes within the radius of each point. Is there a way to do the same where it only does this if: 1. A point is connected to the same surface as the current point. and 2. A point is within X units distance on the surface from the current point. Not point to point straight line distance, but the shortest surface distance between 2 points on the surface. I am not sure if there is a proper name for this. Not the best pic but something that looks like this: As you can see the length of the shortest path that lie on the surface. The surface can be polygons or NURBS. This can't be faked with neighbour functions as edges are too coarse. Can this be done using point clouds? If not, VEX? If not, then any other solutions in Houdini? It's gonna be a per point operation though just like VEX/VOPs. Thanks -
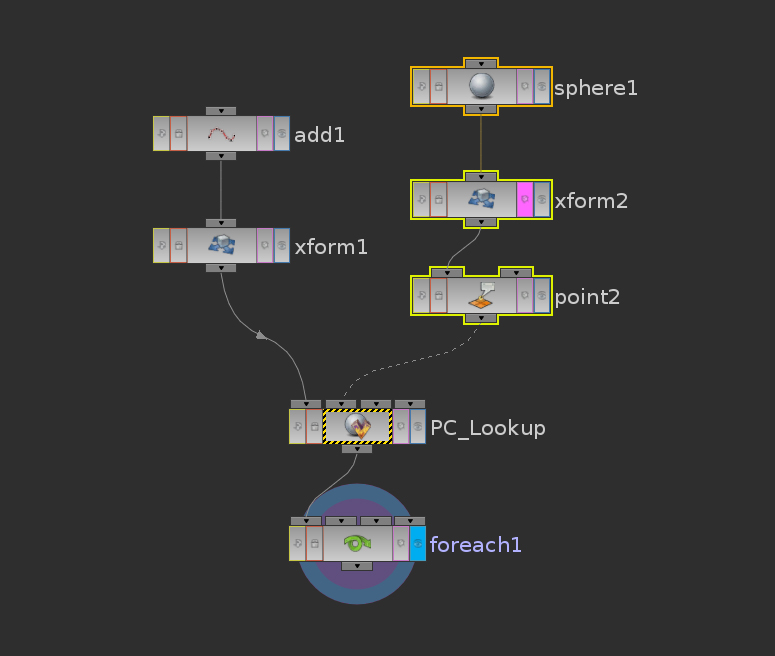
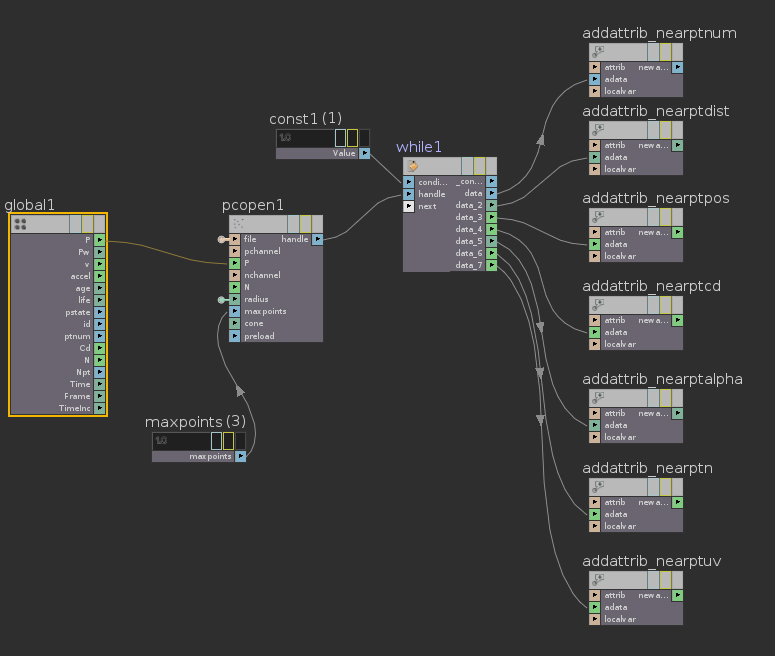
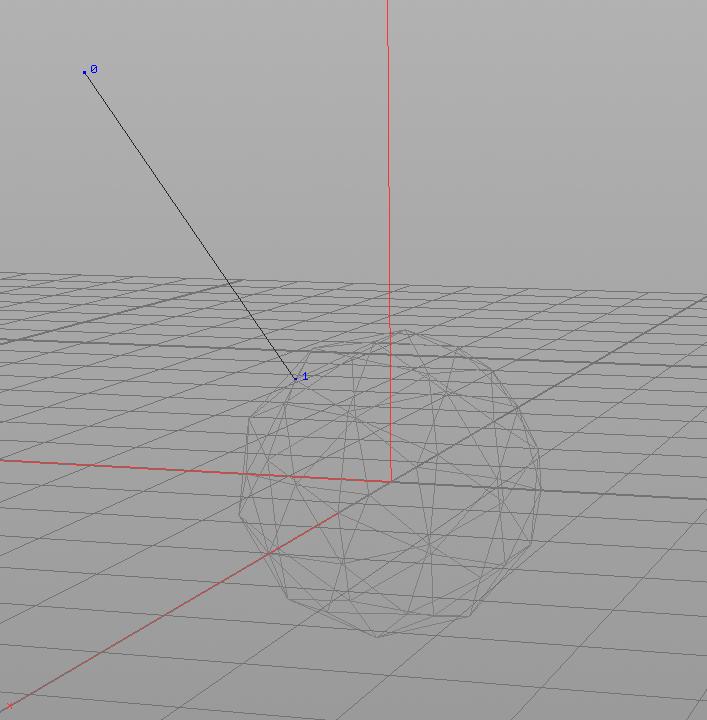
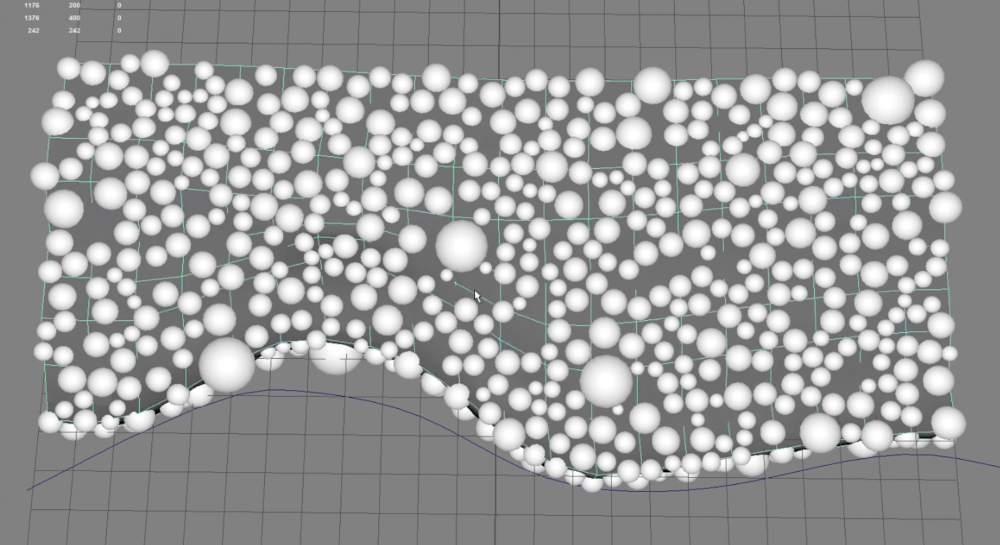
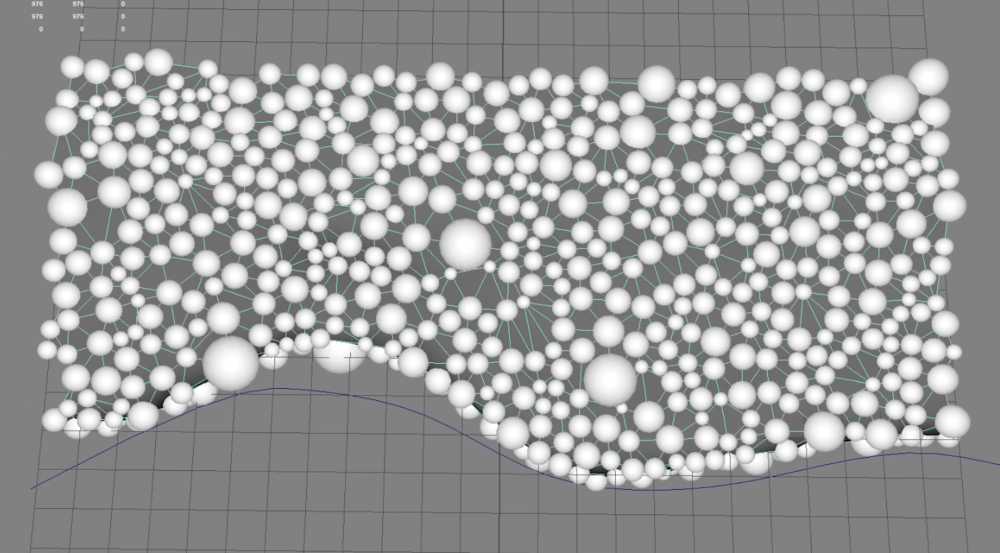
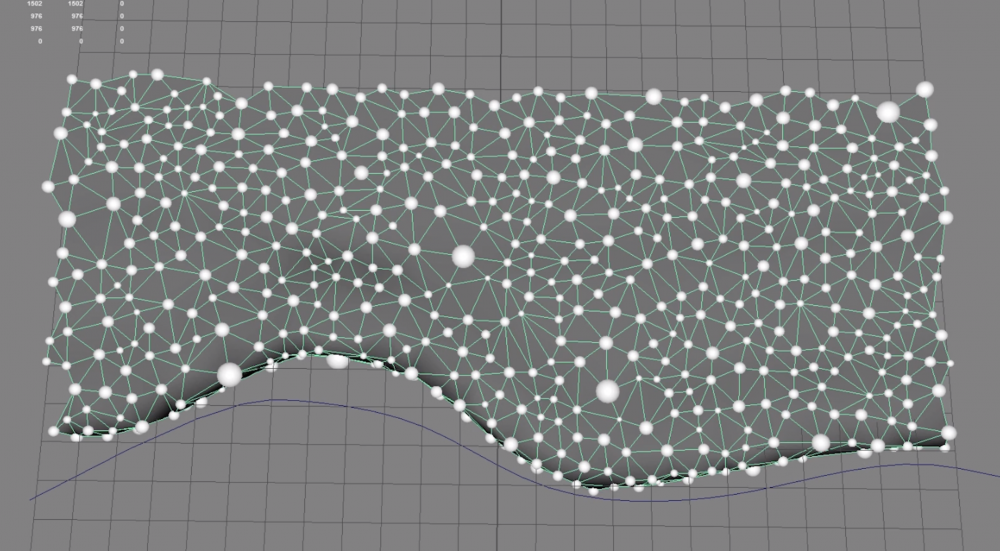
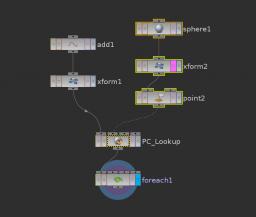
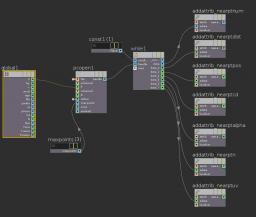
A VOP performs a pointcloud lookup and uses while loop in oder to take advandage of the pcimport node to get distance,ptnum ,P etc. How can I store the result of each loop in a while node in vops? Each loop gives me a point but I only get the last point out of the node( although I have set max number of points to a number higher than one.. ) Maybe somehow push/append them into an array so I can call the later on? If that is the way, arrays in vops need inline code (afaik..) and I haven't managed to figure i out... One of my goals is to draw multiple lines that connect the look up point with a number of points on the pointcloud(= max number of points) without puting the VOP and the Foreach node into another ForEach node out side the vop (because it is not fast). I hope all this makes sense ......thanks ps. play a bit with the slider of "max number of points". Slide it from 1 to 4 and you'll see the line jumbing to the next point. I want to be able to store these points without movin the slider.. Push in array.hip




.png.f2178938150be3a8a3098d3aea743761.png)
.png.0993f8396a73e4e599e7df7db75d5909.png)
.png.bdeeade59167622c2690fd496ec78560.png)