Search the Community
Showing results for tags 'bullet'.
-
I'm looking to transform one shape of packed RBD's into another. I've looked at the forum and a few of the examples. Specially the lego car which is awesome but they all tend to transform the same set of Packed RBD's from a rest shape to complete form. I am looking to transform from one shape of object to another shape of object. this is a pure Position and Rotation transformation and I think I'm just not understanding the way rotate work to show this I've made a simple houdini file. Any Help to better understand this would be appreciated. packedgeo_shapetoShape.hip
-
Hi guys, I just want to ask one quick question. I am using bullet solver and want to count hit value of pieces with collision geomectory. I tried pop collision detect also but its not working on rbd. thanks
-
Trying to do bacterial growth with bullet, I can grow the bacteria rods with the v@scale attrib and then replace the extended rods with two split bacteria, that then grow and split: replicate_bac_8-31.mp4 The problem is that the rods don't get pushed around like I would like. They wind up all oriented the same and pile up on each other. I am sure it is due to how I am sourcing the split prims... When I simply spawn the rods and then grow them they push each other around properly: spawn_bac_8-31.mp4 Here is the hip file with both the grow and split and the spawn: bac_replicate_rnd_01.hiplc There's an old post on this topic that has a good reference for the bacterial replication, but no attempts at using bullet: I also tried going back to 18.5 and using intrinsic transforms instead of what I suppose is the naive method of copying to points, - and using the reset bullet id trick instead of the @scale attrib as in H9.X - but the results were pretty much the same, here's the hip for that: bac_rnd_18-5_01.hiplc And also some other nice ref showing how the bacteria can twist and make strands ( ultimately the goal is to show a similar effect): elife-32976-video3.mp4 I would appreciate any insight into this - a lot of this bullet stuff still seems like voodoo. For instance I am merging the new prims with existing prims and then deleting the old prims just to get the bullet attribs on them, I couldn't find any information about how to properly initialize new bullet prims for example. So thanks for any attention to this -jb
-
Not long ago I was tasked with a simulation of bags of hard candy falling and splitting open on the floor, with the candy of various shapes and sizes spilling out. This turned out to be way harder then I thought. There is really no built in way for vellum and bullet dynamics to interact with each other in Houdini. After searching the internet, I did find one tutorial on kind of faking the interaction, but it seemed overly complicated to me. So after a bit of R&D I came up with this setup. Its very simple and fast, and solves both the vellum and bullet sims in one network at the same time: It basically works by importing the RBD geo into the vellum collision solver, and the vellum geo into the bullet solver. The mass of the RBD has to be faked in somewhat, so it interacts with the cloth in a more realistic way, but that's it! See hip for example: vellum_x_bullet.hip
-
Hi, I'm trying to remove objects and collision objects from an RBD Bullet Solver simulation. Removing objects work inside the node connecting a geometry wrangle to the presolve output using 'removepoint' with the packed rbd geometry. I try to do the same with the collisions, but I'm not sure how to access the collisions from the geometry wrangle. I also tried the Collision Geometry input of the RBD Bullet Solver, and use a switch or move the geometry of colliders, but it does no seem to work. Any suggestions would be appreciated. Gabor
-
Is it possible to access primintrinsics in dops? I have Geometry wich is transformed by a sim. For the second rbd sim i want to make the geometry look at a particular direction. For example to its original direction. So I deleted all Attributes from the first sim to prevent side effects and connected it in to the second sim. To make it look to a direction i want to use the poplookat node (target is direction) in dops. I enabled VEXpression. This is my VEXpression setup: target = {1,0,0}; refdir = v@xdir; up = {0,1,0}; refup = v@ydir; Now i need the original X direction and the Y direction from my Geo. I could convert the primintrinsic "transform" matrix to the directions, but somehow it is not possible to do that in dops. is there any solution?
-
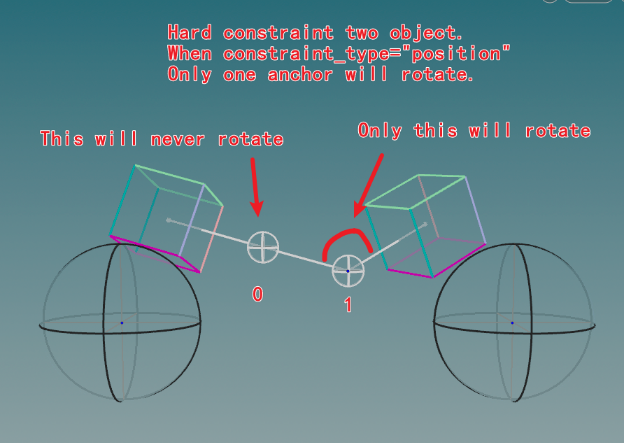
Hi I just want to confirm if my understanding is correct. Basically in a simply scene like this. Two object hard constraint together with two anchors in between. When constraint_type = "position", only one anchor should rotate. Simply because only two object involved, if they are constraint by one line, they should rotation around one point. If we want to achieve effect of box rotate around two anchors, there has to be a third object in between. Otherwise there will only be one anchor rotate. The other one will never rotate in constraint_type = "position" mode. I'm not sure my understanding is correct, can someone confirm this? Thank you.
-
The gist of the effect I need done is this. I need this Logo to start out fractured into a ton of pieces and off screen in all directions then I need the pieces to kindof suction in towards the screen center where they come together to form the full logo My current workflow is basically run the sim backwards (the logo starts off fully formed and i explode it outwards, then reverse the RBD sim) The problem when I reverse the sim I get a very harsh stop on each piece once the piece gets to its start pose I fix this sort of by running a jiggle or lag CHOP motion effect over the points after i reverse the sim, adding some overshoot to the sim so it overshoots the rest pose and then settles back into the rest pose the issue is now i get intersections with the pieces. Was hoping someone might know how i could maybe run another simulation on top of the reversed sim? Like have it follow the same motion but adjust for self collisions?
-
Houdini community, Hoping to get some advice with something that has me stumped. I've attached a hip file to demonstrate the situation. I'm attempting to create a controlled shatter on a moving object using the Bullet_Solver sop. I've gotten as far as animating my pieces to be active or inactive so they release from the animated object as required, collide, etc. My big issue is how to make use of constraints here. I want to have glue constraints keeping things sticking together in a more interesting way but I can't seem to get them to do anything. Should the constraints themselves be moving or static? Does that matter? Should I create them a different way? Any help would be appreciated. Thank you. moving_constraints.hip
-
Hello fellow magicians, I've struggled alot with RBDs in the past. Along the way, while doing various projects I spent countless hours researching and debugging and I realised that most of the information is scattered all around... and this is not ideal. So I thought it would be a good thing to have a "main" post where more experienced artists and TDs could share a bit of their experience and .hip files with the rest of the community. There are many instances where this happens here on odforce, for example the thread on small scale flip fluids or the thread on getting rid of mushrooms in pyro. Since I'm starting this, It's only fair that I share a little .hip file myself. With this exercise I'm creating the tipical situation where the Bullet Solver can't stop the wood shapes from jittering and spinning and the simulation doesn't come to a rest. So I added popwrangles and a popspeedlimit to solve the problem. I'm aware that there might be more optimized ways of doing this, maybe with a POP awaken node? Nonetheless, this is my approach to solving the issue. As a bonus trick, I added a way to awaken the inactive pieces only near the desired collider. Here is a very good article on tips and tricks for bullet simulations in case you wanna have a look: https://80.lv/articles/destruction-simulation-tips-and-tricks/ Cheers, Diogo Ferreira rbds_stop_jitter.hipnc
-
- 3
-

-
- bullet
- convex hull
- (and 4 more)
-
I'm working with RBDs and I want to apply a popdrag only to my fractures from the rbdmaterialfracture node that are in the concrete_chips group. These groups don't seem to come in by themselves, and after a bit of trying things, I found the POP group node... The way I'm doing it now is: I created a point attribute called concrete_chip that is only 1 if it's in the concrete_chips group from the rbdmaterialfracture node. Then in the dopnet, I am using a POP group with group name to "concrete_chip" and have if(@concrete_chip == 1){ ingroup = 1; } Is this the most efficient way of accessing groups in a dopnet. Seems a bit roundabout, but it works.
-
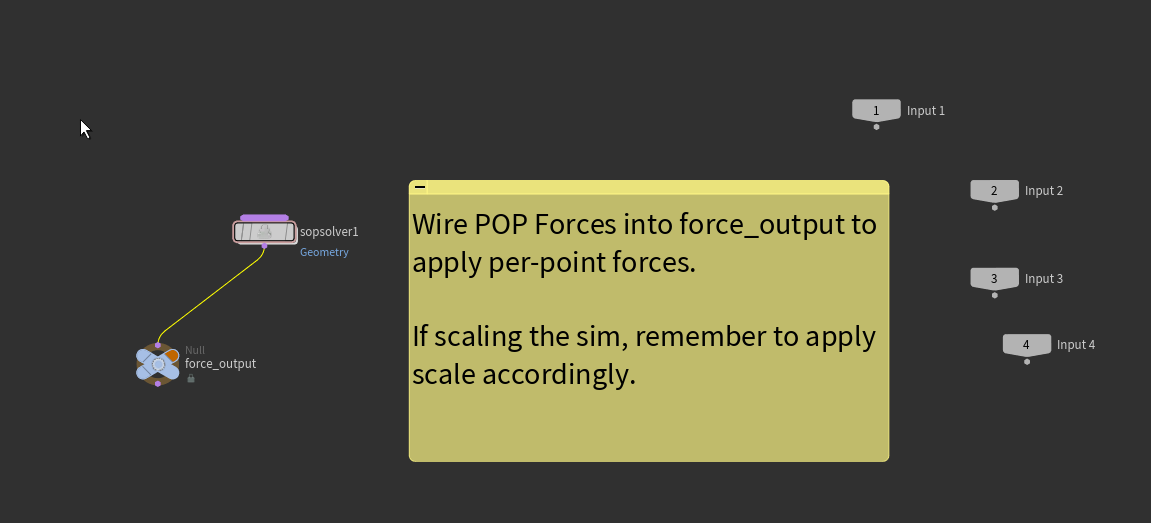
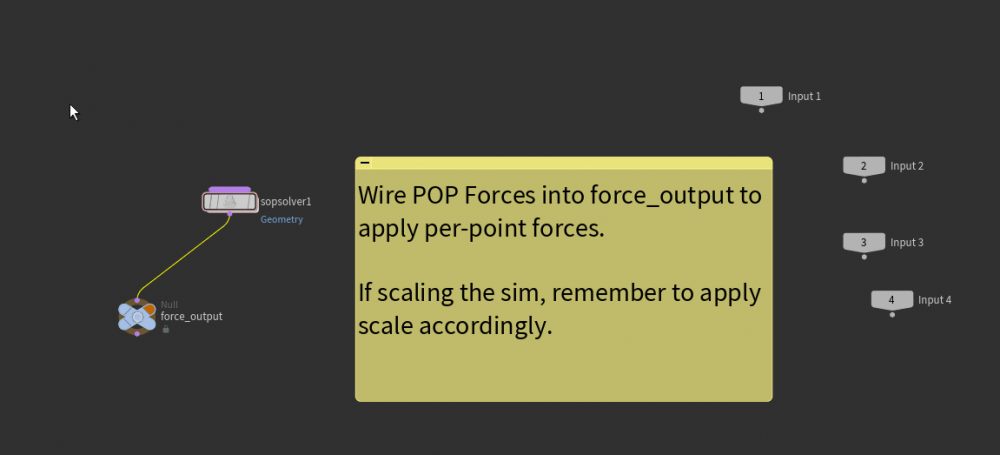
Hi, Is this the way to add a SOP Solver in the new RBD Bullet Solver SOP? I noticed that we have access to a lot of nodes inside it. It says "wire pop forces into here" but not sure how to hook up a SOP Solver. I'd like to set up some custom activation inside this RBD Bullet Solver SOP.
-
Hello guys. I found strange behavior in bullet. I have medieval wooden cart, full of heavy stones, moving fast from the hill. By default, bullet have 10 substeps, should be good enought. Cart is rigged, and it is deformed, twisted so I need him as deforming static object. If I check cart with timeblend, frame increment 0.1 in SOPs, I can see slight movement of geo, dive to DOPs, bullet stones fall, but my cart, deformed static geo is jumping on full frames. No movement inbetween frames. That causes ofcourse incorect collisions and all kind of bad things. I tested in H18, H18.5 same results. So I never had collision geometry substeps??? Is there some easy fix, how to force bullet recompute deforming static object every given substep? Thanks a lot.
-
-
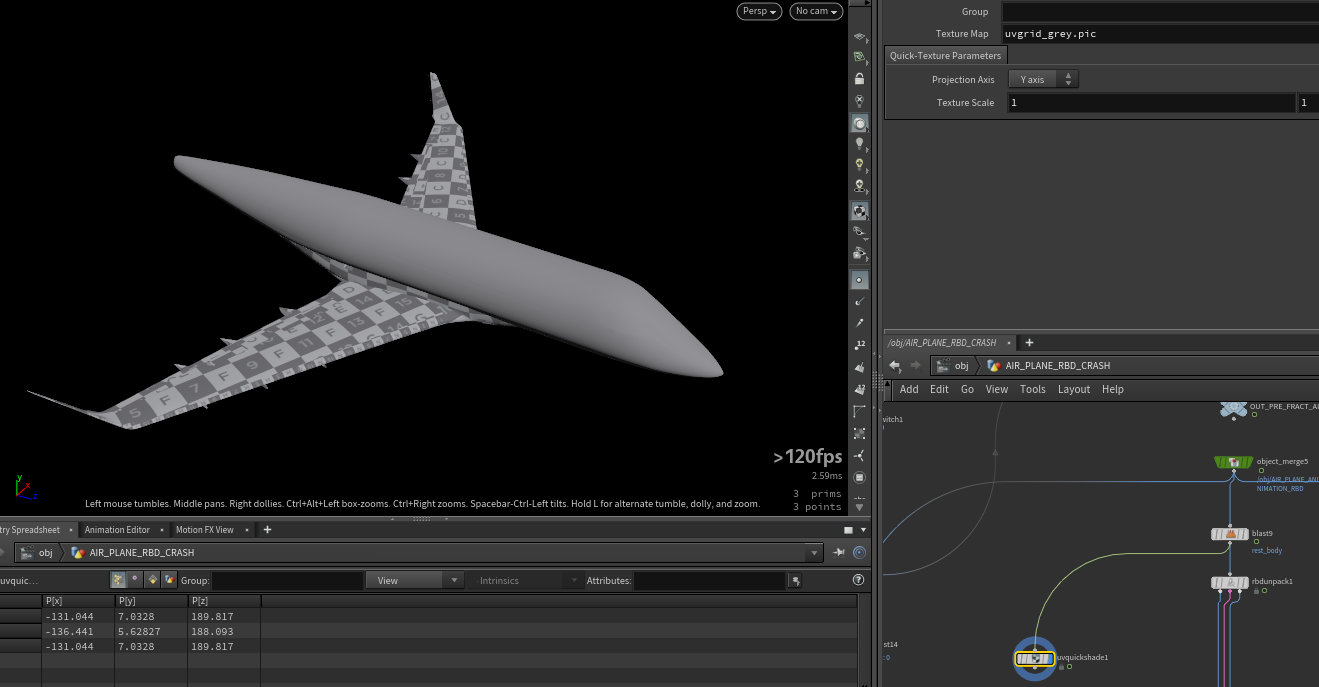
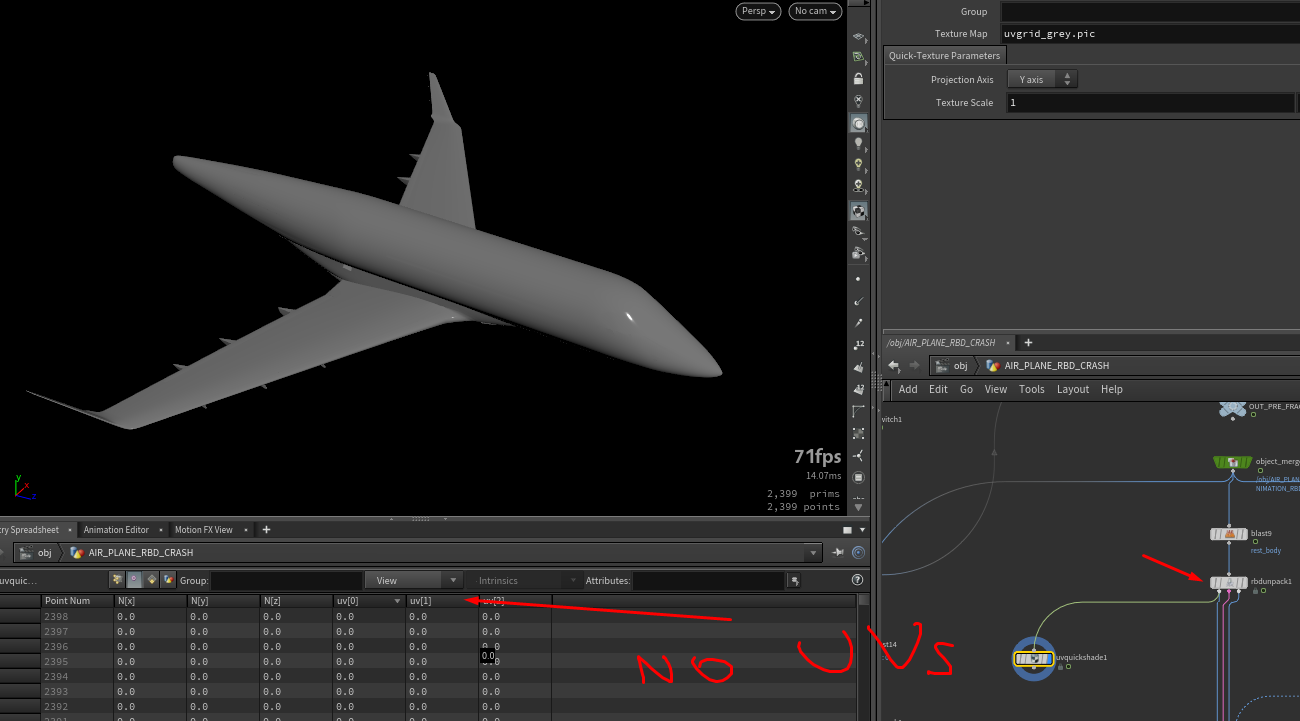
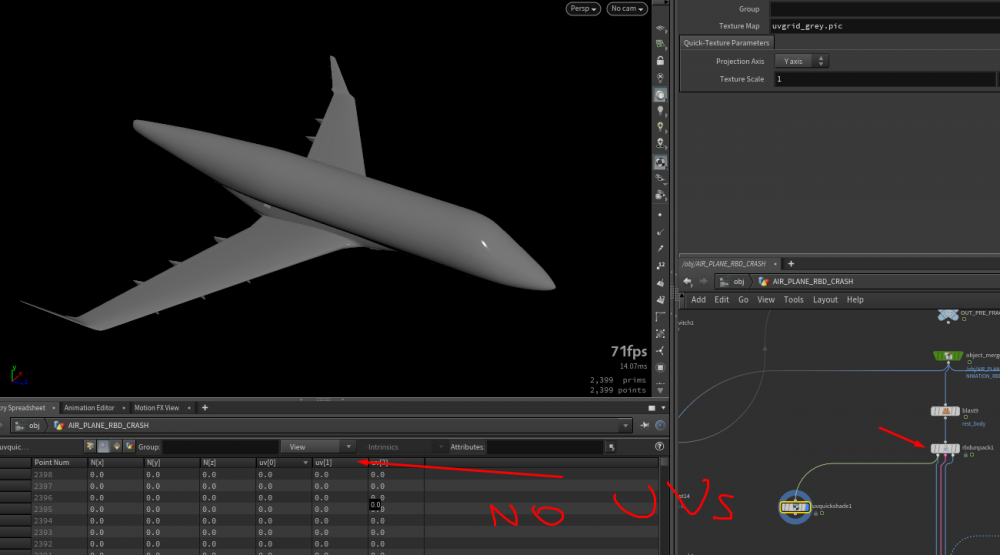
Hello guys, I'm setting up a active rbd pieces using rbdconfigure and rbdpack, after the setup even setting to transfer all attributes the UVs get lost.
-
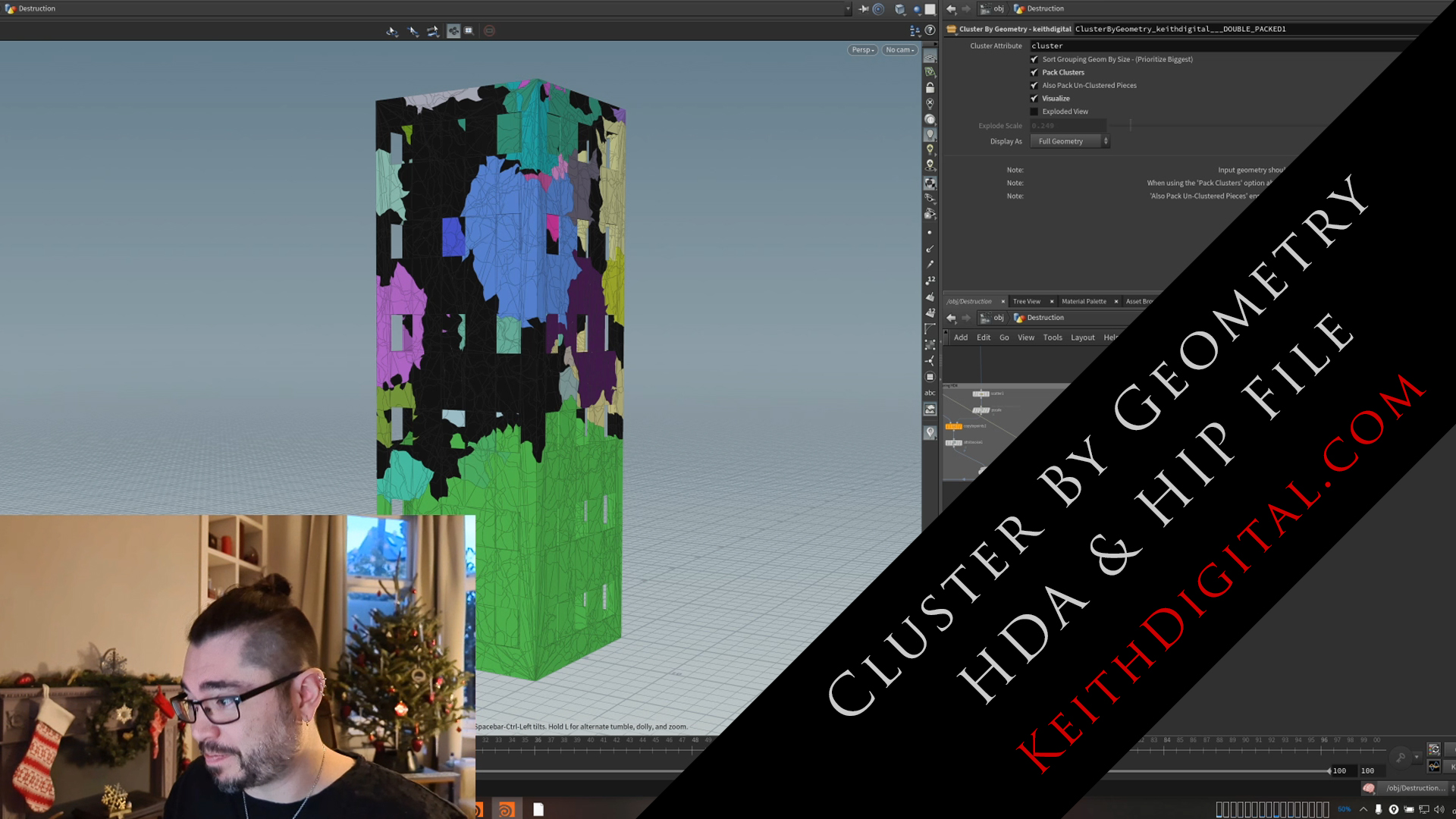
 Hi all! I recently made a free public post on my Patreon, a bit of a New Year's gift. In my destruction classes & SideFX conference presentations I've mentioned that I often use geometry grouping to define the clustered sections in my RBD sims. However, it takes a bit of work to create the feedback for-each loops to set that up, so I've finally wrapped it up into a helpful HDA. Demo HIP file included as well. (I also included the HDA in the November 2020 'quick tip' post, but this version fixes a bug in the size-based prioritization, so for patrons that have that version I highly recommend downloading this one instead!) https://www.patreon.com/posts/45769153 https://vimeo.com/496659441 Hope you find this useful, and that you enjoy the new year! :-) ~ Keith
Hi all! I recently made a free public post on my Patreon, a bit of a New Year's gift. In my destruction classes & SideFX conference presentations I've mentioned that I often use geometry grouping to define the clustered sections in my RBD sims. However, it takes a bit of work to create the feedback for-each loops to set that up, so I've finally wrapped it up into a helpful HDA. Demo HIP file included as well. (I also included the HDA in the November 2020 'quick tip' post, but this version fixes a bug in the size-based prioritization, so for patrons that have that version I highly recommend downloading this one instead!) https://www.patreon.com/posts/45769153 https://vimeo.com/496659441 Hope you find this useful, and that you enjoy the new year! :-) ~ Keith
-
- 1
-
-
- hda
- destruction
- (and 5 more)
-
Hi everybody, I'm looking for a way how to create dynamic constraints with Bullet. The basic way doesn't work. Take a look at hip file please to see the problem. Any help would be appreciated! Thanks! bullet_dynamic_con_issue_v01.hip
-
Hi, The problem is getting RBD Bullet pieces to floating properly: Icebreaker_fake_Buoyancy_Bullet_SpinningProblem.mp4 IceBreaker_Ship_PopForce_VexMask.mp4 im running into problem simulated flat sheets of ice being buoyant in a volume. I can get them to rise to the surface with PopFloatByVolume and also a fake popForce with vex using the pieces depth to mask the upward force. The problem is getting them to not spin around the packed bullet point per piece, and instead have proper per point of the mesh have force applied as per proper buoyancy would. So they lie flat once they get to the surface of the water volume! Struggling with the PopFloatByVolume spin settings, and PopSpinByVolume doesnt seem to play ball either. Im trying to go down the setPrimIntrinsic route, where i could blend slowly the rotation to be flatter as they get to near the surface, but im not hitting gold yet and would be great to know if theres a better route. any ideas or approaches would be amazingly appreciated. attached the hip file with where im at. IceBreaker_PopFloatVol_CustomVolumeInput_005.hiplc
-
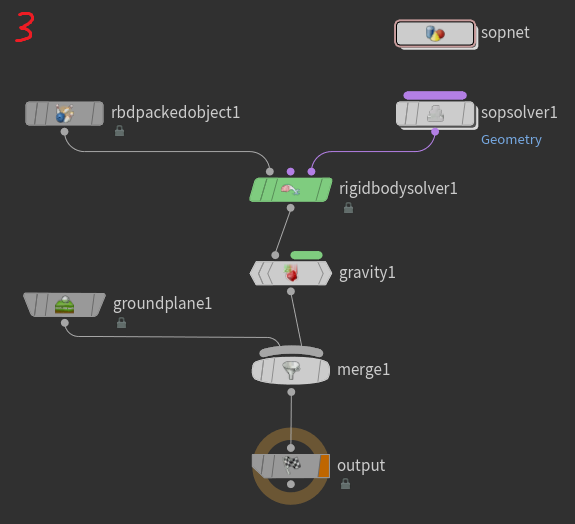
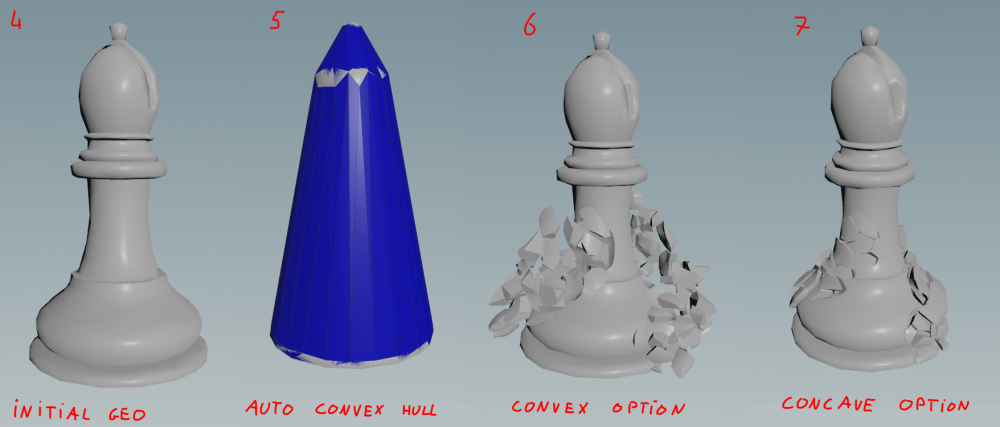
Hello everyone, I'm trying to do a multiple explosion effect on a piece of geometry with a glass material and I have some issues with concave shapes. Since the object needs to be transparent I cannot use any kind of pre-fracturing, otherwise it would show. (picture 1 & 2) So I setup a DOP network with a SOP solver inside to fracture the geometry dynamically. (picture 3) It works fine and the explosions are happening as planned. But since the geometry is concave, a convex collision shape is automatically created around it. (picture 5) And this causes the pieces created from explosions to be pushed outside instantaneously (picture 6). So I've searched for ways to handle concave geometry and this is what I found: Use the "concave" option in the "rbd packed object" node. It works! (picture 7). But it is excruciatingly slow, and this chess piece is part of a larger simulation with other chess pieces with similar issues. So in the end it would be difficult to work with everything being so slow. Decompose the base geometry into convex shapes. With the "convex decomposition" SOP for example. Since it produces several pieces, I can't display the result directly as the object is transparent (same issue as picture 2). And since I fracture the geometry dynamically I don't see how I could replace the simulated geo with some display geo in the end. Maybe I'm missing something here, but I don't know how to replace proxy geometry with display geometry when the proxy geometry is dynamically fractured. The "compound" option in the "rbd packed object" node The description of this option looks promising in the documentation, but it specifies that you need to use a node to generate some data, and that node is deprecated... It is replaced by another option called "Create Convex Hull Per Set Of Connected Primitives". But as far as I understand, your input geometry needs to be made of several "pieces" for this option to be useful. Is there anything I missed here? A method for generating collision shapes that doesn't involve breaking your geometry into several components?

-
 If you look at the attached ColIgnoreA.mp4, you can see the "red" and "green" collisiongroup attributes ignoring one another. Results are as expected. In ColIgnoreB.mp4, with those same collision ignore groups, I glue one red and one green sphere together. The free red sphere now collides with the green sphere, which is not as expected. The best I can tell is that when these pieces are glued together, they somehow combine their collision groups. When I set collisionignore as "red green" it ignores them both. However I still want red to collide with red, so it does not work for me. What's more is that Soft and Hard constraints work as expected, ignoring green sphere collision. Only Glue is strange like this. Is there a way around this? ColIgnoreA.mp4 ColIgnoreB.mp4
If you look at the attached ColIgnoreA.mp4, you can see the "red" and "green" collisiongroup attributes ignoring one another. Results are as expected. In ColIgnoreB.mp4, with those same collision ignore groups, I glue one red and one green sphere together. The free red sphere now collides with the green sphere, which is not as expected. The best I can tell is that when these pieces are glued together, they somehow combine their collision groups. When I set collisionignore as "red green" it ignores them both. However I still want red to collide with red, so it does not work for me. What's more is that Soft and Hard constraints work as expected, ignoring green sphere collision. Only Glue is strange like this. Is there a way around this? ColIgnoreA.mp4 ColIgnoreB.mp4 -
Hello everyone, I'm doing a simple packed RBD sim, and no matter how much I increase the fritcion parameters the objects never lose any velocity. Is this the expected behaviour? I've attached the .hip file. test.hip
-
Hey houdini people, I am trying to shoot a bottle. My approach was to take the bottle and fracture it use glue to keep it together take a bullet and give it velocity to hit the bottle Bottle breaks correctly I am happy Well, step 4 and 5 are still missing. The bullet does bounce off and then the bottle breaks at the bottom which is kinda weird. Is my approach correct? Any hints what to change/improve? Any pointers to a topic I should look into or a tutorial? Thanks for your input
-
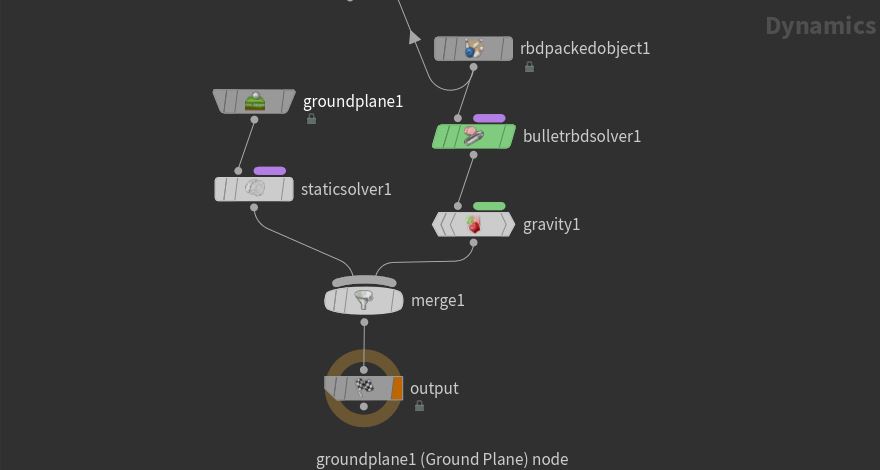
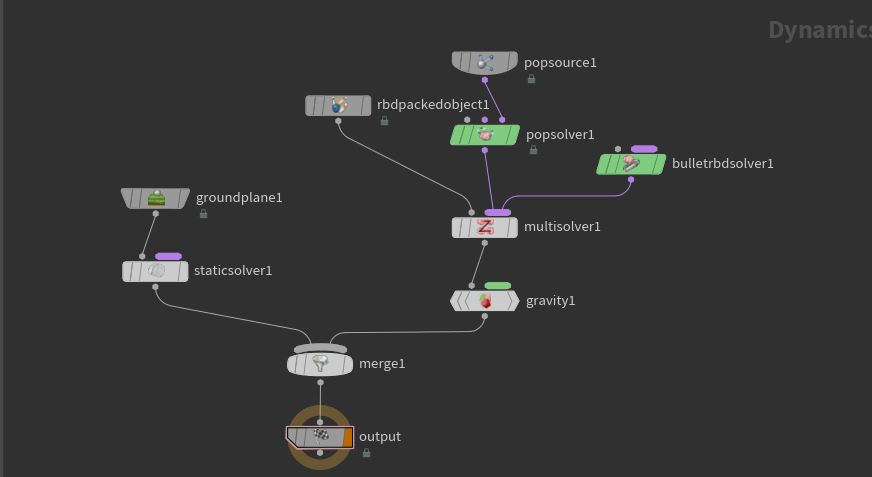
I'm having different results in my simulations using packed rbds connected only to a bullet solver vs when using a POP source to emit the rbd packed object into a popsolver/bulletsolver multisolver. The bulletsolver alone is giving me the expected results... I've seen some tutorials and tips by artists that recommend the multisolver approach, because it allows control of the RBD sim using pop forces and wrangles, and thats why I'm asking this. bullet_solver.mp4 rbd_multisolver.mp4
-
Hi, I try to make a car glass bullet hit... I can't figure how to make the connected pieces which stay attached to glass, I tried "soft constraint" of the "Material fracture node, but I can't figure how to break the soft constraint in some distance, pieces always returning back no matter how far they are.. which looks more like a STAR GATE portal opening Sklo_TEST_11.hip
-
Hi I used bullet solver in dopnet. As a result, the pieces come out. It doesn't simulate correctly (like pushing each other). Any tips on this? I used 'primitive node' to reduce the size of the pieces before doing the simulation so that there are fewer collisions.